
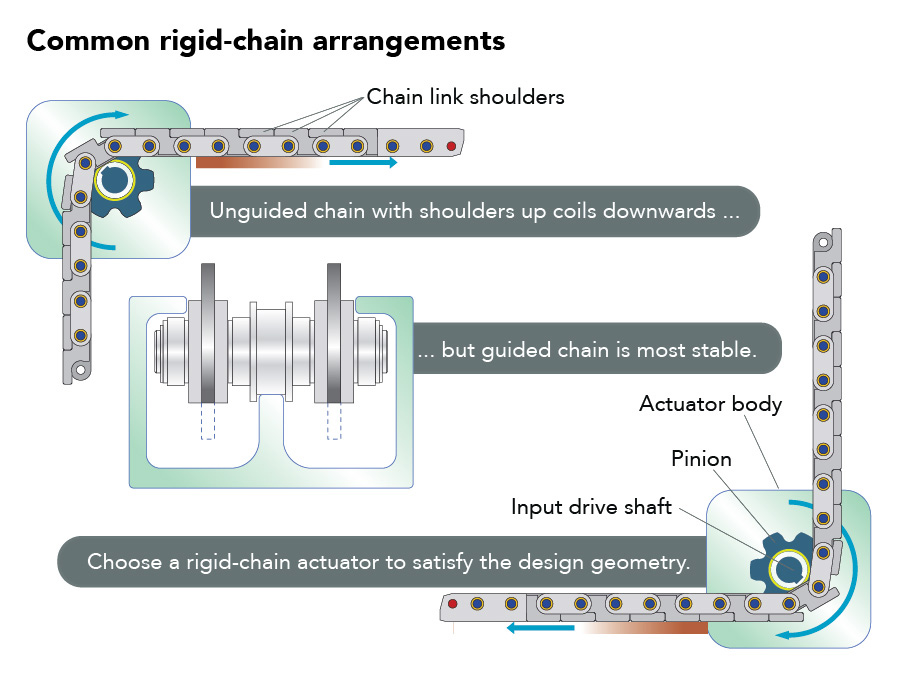
Updated November 2018 || Rigid-chain actuators work by pairing a drive (usually an electric motor) with a length of chain sporting shoulders on each link. The motor output shaft—fitted with a specialty sprocket or pinion—applies tangential force to the chain. Then the chain comes out and straightens, and its links’ shoulders lock to form a rigid series. When the motor runs in the opposite direction, the chain shoulders disengage and allow for coiling. More after the jump.

Inside the actuator body, reaction plates and guides counter thrust resistance and keep the chain on track. Links travel around the pinion to exit the actuator body along the stroke path. Here, the motor’s torque comes to act as forward thrust via the link shoulder to the rest of the links’ shoulders. The last link in the chain before the load has geometry that puts the thrust higher than the articulation axis. This makes a moment that effectively locks the link shoulders. In reverse, pulling force acts along the links’ cross axes.
Rigid-chain actuators have the mechanical benefits of conventional chain but can act in horizontal push setups or vertically as jacks. Plus they’re compact. In contrast, traditional chain drives can only pull, so need two drives for bidirectional motion. Traditional screw jacks for vertical power transmission need space for retraction that’s as long as the working stroke itself.
Before specifying a rigid-chain actuator, determine the application’s total load, including the transported load, acceleration forces, external environmental forces, and that due to friction—with a coefficient between 0.05 and 0.5 for typical rigid-chain actuator setups. Next, determine what type of actuator body and chain-storage magazine the application can accommodate. Determine whether the chain will need to change direction on its way from the magazine to actuator body. Actuators usually feed chain around 90° or 180° turns.
Note that rigid-chain actuators can work alone or in tandem. Twin-chain setups deliver high positioning accuracy and stability where loads are large or bulky.
Here, a pushing bar acts as a yoke to keep loads steady, with optional hooks for pulling as well. Optimized geometry has the force vector act on the load’s center for balance. If twin-chain setups are impossible, consider adding framework to guide awkward loads.
Guides on the chain also help maintain stability—even over very long strokes—because they address side and buckling forces. Such guides come in different shapes with different crampons and subcomponents to engage the chain. Where use of chain guides is impossible, most designs run the chain with link shoulders down for moderate stability.
Some last design notes: Standard chain is carbon steel to withstand heat to 200° C, but stainless, high-temperature, and coated chain for long life are other options. The required length of chain is total design stroke plus a few links to engage the actuator pinions.
As with any power-transmission setup, consult the manufacturer for tips and guidance on determining necessary drive power and other details.

Now a new SERAPID QSX Seating System based on SERAPID rigid-chain actuators and other technologies operates at the Philharmonic Concert Hall at Zaryadye Park in Moscow. The QSX installation is the first to combine raked curved-row seating with a reconfigurable venue system. In fact, the entire hall can transform from a flat floor to raked seating in less than 15 minutes. For the latter, twenty curved rows range from 23 to 30 meters for 677 seats total.



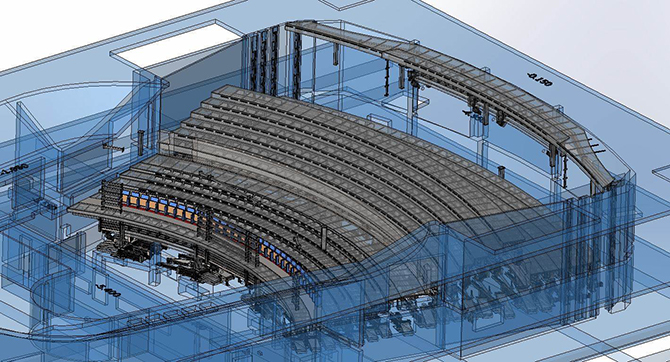
Zaryadye Park includes three performance venues, with the concert hall considered its most complex element. The integrator Doka selected SERAPID to deliver the most advanced venue technology available. The concert hall opened in September 2018.





Where can I Buy a Rigid Chain linear actuator to push/pull a guided horizontal 10Kg load at 1m/Sec
with a duty cycle of 100%