
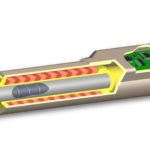
Depending on the exact technology, typical linear motors can deliver unlimited strokes and (with feedback) accuracies to ±1 μm/100 mm. Speeds range from inches to 1,000s of inches per second. Semiconductor manufacture and assembly as well as machine-tool applications continue to account for the majority of linear-motor applications. However, increased focus on efficiency is spurring […]
Applications
Motion Trends: Stages, Cartesian robots, and tables for complete motion designs

New trends in multi-axis motion designs abound. Consider the rise of metrology reports to accompany designs — which serve as “birth certificates” in the form of well-informed simulation models and Excel spreadsheets that quantify the accuracy and capabilities of pre-engineered builds. In some cases, such reports give OEMs and end users accurate data on how […]
What is servo tuning and why is it important?

Unlike stepper motors, which rely on even pulses of current to turn the motor in discreet steps, servo motors operate with continuous current to reach a specified position, velocity, or torque. The precise amount of current to be delivered to the motor is determined by the servo controller, based on information supplied by an encoder […]
How does closed-loop stepper control work … and why not just use a servo?

Stepper motors are inherently open-loop devices. They don’t require feedback because each pulse of current delivered by the drive equals one step of the motor (or a fraction of a step in the case of microstepping). Plus with small step sizes (or step angles) the motor’s position can be determined very precisely without the need […]
What is Abbé error and how does it affect linear systems?
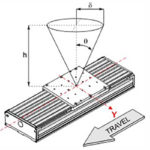
When evaluating the accuracy of a linear motion system, the area of focus is often the positioning accuracy and repeatability of the drive mechanism. But there are many factors that contribute to the accuracy (or inaccuracy) of a linear system, including linear errors, angular errors, and Abbé errors. Of these three types, Abbé errors are probably […]
Follow these four tips when using L10 life to size linear bearings

The well-known bearing life equation, often referred to as L10 life, is a fundamental element in the sizing and selection of recirculating linear bearings. Through statistical analysis and real-world testing, the L10 life equation can predict, with 90 percent reliability, the life that a recirculating bearing can be expected to achieve. But even this universally […]
What’s the difference between backlash and hysteresis in linear systems?
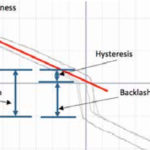
In linear systems, backlash and hysteresis are often referred to as the same phenomenon. But while they both contribute to lost motion, their causes and methods of operation are different. Backlash: The enemy of linear systems Backlash is caused by clearance, or play, between mating parts, which introduces a dead band when the direction of […]
Why are planetary gearboxes preferred for servo applications?

In a servo application — one in which a feedback device is used to control torque, position, or speed of a linear or rotary system — the ratio of the load inertia to the motor inertia is a critical factor in system performance. A lower inertia ratio allows the motor to more precisely control the load […]
How to size a rack and pinion drive

In linear motion applications, ball screws are widely recognized for their ability to provide high thrust forces, while linear motors are gaining market share in high-speed applications, and belt drives continue to maintain their reputation as the best solution for long travel lengths. But rack and pinion drives are the often-overlooked workhorses behind gantry and […]
Where are glass scale linear encoders used?

Linear encoders are generally classified by their scanning technology — optical or magnetic. Magnetic encoders use a metal scale (often referred to as a “tape”), while optical encoders use a scale made of either metal or glass. Although magnetic encoders have seen great improvements in resolution and accuracy in recent years, for single-micron and sub-micron […]
