

You might be familiar with rotary needle roller bearings (often referred to as simply needle roller bearings) which are used extensively in automotive and industrial power transmission applications due to their compact size and high load-carrying capability. But did you know that some linear bearings also use needle rollers? For linear bearings, needle rollers were […]
FAQs + basics
Why are cages used in crossed roller guides?

Crossed roller guides are non-recirculating linear bearings whose rollers are oriented in a “crisscross” pattern (each roller is turned 90 degrees relative to the one next to it) and move between two parallel guides with V-shaped grooves. Because the rollers don’t recirculate, these guides provide high load capacity and good stiffness, with smoother motion than […]
When to use linear bearings and ball nuts with ceramic balls

Ball nut preload: What effect does it have on bearing life?
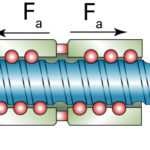
Ball nut preload offers several benefits to screw assemblies, but the most common reason for using a preloaded ball nut is to reduce axial play, or backlash, caused by clearance between the screw and nut raceways. Reducing this axial play does two things. It improves the repeatability of the screw assembly — meaning the assembly […]
What is curvilinear motion and when is it used?

In single-axis motion systems, travel is typically either linear (in a straight line) or rotary (in a partial or complete circle). But some applications call for a system that combines straight sections of motion with curved sections — referred to as curvilinear motion. Curvilinear systems generally take one of two forms: simple, constant-radii sections (such as […]
Stepper motor performance: Is it possible to get high torque at high speeds?
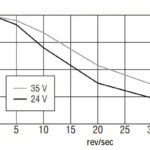
The most notable stepper motor performance characteristics are precise positioning, good holding torque, and good low-speed torque characteristics. But in some cases, application parameters necessitate high torque production at high speeds, while design or control constraints dictate the use of a stepper motor. Although stepper motors aren’t notable for their ability to produce high torque […]
Motion controller basics: What are the differences between PLCs, PACs, and IPCs?
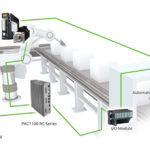
As the “brain” of a servo system, a motion controller is responsible for ensuring the motor is following the specified motion profile and correcting any errors between the commanded value (in terms of position, speed, or torque) and the motor’s actual value. The motion controller also handles other supervisory and processing tasks, such as ensuring […]
How to calculate maximum encoder speed for linear and rotary designs

When choosing an encoder for motion applications, a few specifications immediately come to mind. What sensing technology should you use? What accuracy and resolution do you need? Does the application require incremental or absolute position feedback? But one specification that is sometimes overlooked during sizing and selection is the maximum encoder speed. Like any electrical […]
What are Hertz contact stresses and how do they affect linear bearings?
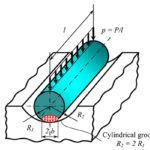
Linear bearings that use balls or rollers to carry a load are subjected to Hertz contact stresses — a type of material stress that plays a significant role in determining the bearing’s load capacity and fatigue life. When two surfaces of different radii are in contact and a load is applied (even an extremely small load), […]
Bearing damage: What’s the difference between brinelling, spalling, and fretting?

Bearing damage, and ultimately, failure, can be caused by a variety of conditions, including improper mounting, poor lubrication, and overloading, to name a few. The mode of damage — what actually happened to the bearing as a result of detrimental conditions — is characterized by visible features, such as discoloration, wear marks, or pitting, on […]
