
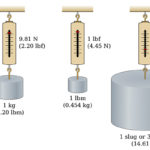
Converting between mass and force is a common step in the design and sizing of linear motion systems. If you’re lucky, you work primarily in one set of units — either metric or English. But it’s likely there has been (or will be) a time when you need to work in both systems of units, possibly […]
FAQs + basics
How to generate the motion profile for a linear system
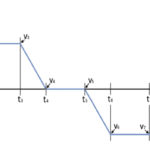
One of the first steps in sizing any type of linear guide or drive component is to determine the required motion profile. The motion profile is simply a way to define and graphically depict how the component should achieve the specified travel, in terms of velocity and time. The motion profile is the basis for […]
Gallery: Hexapod robots – design variations and applications

Hexapod robots, also referred to as simply “hexapods” or “Stewart platforms,” are a type of parallel kinematic device with six degrees of freedom. You might recognize hexapod robots as the technology behind motion simulators and vibration isolation mechanisms, where their six degrees of freedom (X, Y, Z, roll, pitch, and yaw) allow them to accurately […]
How to measure synchronous (toothed) belt tension
Updated June 2019 || One of the benefits of synchronous belts is their ability to operate with lower tension than their V-belt counterparts. And once the proper tension is determined and applied, synchronous belts rarely need re-tensioning. But improper tension in a synchronous belt drive system — either too low or too high — can […]
When do synchronous belts need flanged pulleys?

Synchronous belts transmit power via positive engagement between profiled teeth on the belt and pulley. Although this tooth engagement (along with proper belt tension) prevents the belt from ratcheting, the belt is free to track, or move side-to-side, on the pulley. To prevent the belt from riding off the pulley, and to resist the lateral […]
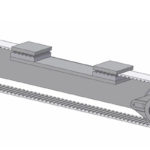
What are linear induction motors?
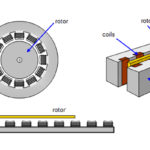
An induction motor is one in which the current in the rotor is induced by the electromagnetic field in the stator, eliminating the use of magnets. A linear induction motor is a type of linear motor based on a rotary AC induction motor. Like permanent magnet linear motors (commonly designated as ironless and iron core types) […]
Are brushed motors suitable for industrial applications?
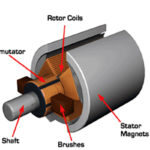
Brushless motors dominate the industrial motion control market, but brushed motors still make sense for some applications, thanks to their linear performance and ease of use. DC motors can use either mechanical or electronic commutation. Brushed DC motors rely on the mechanical method, with brushes and a commutator, while brushless DC motors use electronic methods […]
Mechanical properties of materials: Shafts in torsion

Power transmission shafts — on motors and gearboxes, for example — are subjected to torque loads that result in torsion, or twisting of the shaft about its axis. Similar to structures under tension or compression, two important mechanical properties of shafts under torque loads are shear stress and shear strain. Stress is a material’s resistance […]
Mechanical properties of materials: Stress and strain
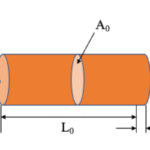
Every component in a linear motion system experiences some form of loading due to applied forces or motion. The component’s reactions to these loads are described by its mechanical properties. For components subjected to tension or compression — such as load-carrying balls and rollers, shafts mounted vertically, or fastening and joining hardware — the mechanical […]
What is servo tuning and why is it important?

Unlike stepper motors, which rely on even pulses of current to turn the motor in discreet steps, servo motors operate with continuous current to reach a specified position, velocity, or torque. The precise amount of current to be delivered to the motor is determined by the servo controller, based on information supplied by an encoder […]
