

Updated May 2019 || Ball screw rigidity depends not only on the screw shaft and ball nut, but also on the thrust bearings and on the ball nut and bearing housings. Where: Rtot = Rigidity of the screw system (N/μm) RS = Rigidity of the screw shaft (N/μm) RN = Rigidity of the ball nut (N/μm) RB […]
FAQs + basics
PID design using frequency-domain methods
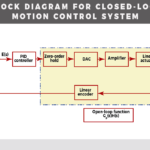
With motion control applications, a PID or proportional + integral + derivative controller is often implemented using tuning or by a trial-and-error process on the shop floor. But modeling of the motion control system allows analytical derivation of the PID controller terms. By Tom Radigan | Advanced Motion Concepts Inc. Modeling a motion control system […]
Common applications for air bearings
Air bearings offer numerous advantages over mechanical bearings such as profiled linear guides and crossed roller slides. But they are still considered by many designers and engineers to be a high-cost solution, primarily for niche applications that require extreme precision. However, their benefits include more than just high precision, and cost is being driven down […]
What are V-belt pitch length and datum length?

The length of a V-belt can be specified in several ways, including outside length, effective length, and pitch (or datum) length. Outside length is measured around the belt’s outer diameter with no tension, but is only an approximation and is not useful for sizing or selection. Effective length is measured at the effective outside diameter […]
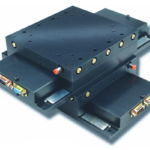
What are planar stages and gantries?

Multi-axis stages are usually constructed in either an XY or a gantry configuration. Within the category of XY stages, there are stacked and monolithic designs. But both XY and gantry stages can be designed as planer types. Stacked XY stages consist of two individual axes mounted together, and they offer a high degree of design flexibility. […]
Synchronous belt failures: Six ways they can occur
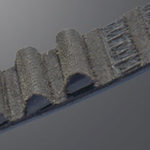
Synchronous belts can transmit high torque without the potential for slip, due to positive engagement between the teeth of the belt and the grooves of the pulley. But the performance of synchronous belt drive systems can be affected by installation errors, unexpected application conditions, or the use of components that aren’t suitable for the operating […]
Pulley balancing for belt drive systems: Is it always necessary?
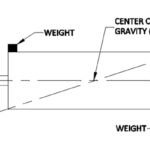
As a pulley rotates, centrifugal forces act on the pulley, and if its mass is not evenly distributed around the axis of rotation – that is, if it is unbalanced – these centrifugal forces will also be unbalanced and cause the pulley to vibrate. (Uneven mass distribution can be due to imperfections in machining or […]
What’s the difference between a piezo actuator and a piezo motor?
In the context of motion control, the term “motor” generally refers to a single electromechanical device that produces rotary or linear motion to drive a system, while the term “actuator” typically refers to an integrated mechanical system that is driven by a motor. But in the context of piezo drives, the term “actuator” refers to […]
What is ratcheting in synchronous belt drives?

Synchronous belts (also referred to as toothed, cogged, timing, or high torque belts) use profiled teeth that mesh with a pulley or sprocket to deliver power transmission – most notably for applications that require high torque. Where V-belts rely on friction between the sidewalls of the belt and the sides of the pulley to transmit […]
High-speed linear actuators: What qualifies them as high speed?

Like many terms used in the linear motion industry, such as “heavy duty,” “miniature,” and “corrosion-resistant,” to name a few, there is no industry standard that specifies what constitutes a “high-speed” linear actuator. Nevertheless, there are some general guidelines that manufacturers follow when classifying and marketing their actuators as high speed. These guidelines are typically […]
