
Mounting orientation is one of the core considerations when sizing and selecting a linear actuator. Depending on the type of linear guides used, some actuators can support higher downward or lift-off loads than side loads, or can handle pitch and yaw moments better than roll moments—all important factors when evaluating an actuator for vertical duty. The type of drive mechanism also influences an actuator’s suitability for vertical operation. Screws, whether ball screws or lead screws, are generally preferred over belts or linear motors for carrying loads vertically, but they do have some limitations.
The unique challenges of working against (and sometimes with) gravity go beyond just loading. Below are five factors that designers and engineers should consider when choosing a linear actuator for vertical duty.
Loading
While load placement and orientation is one of the first parameters to examine in any application, it is worth emphasizing for actuators mounted in a vertical orientation. Because the actuator will be working against gravity during the upward stroke, and will be assisted by gravity on the down stroke, the loads in each case will be different, regardless of the process (pressing, pulling, or transporting, for example). This will affect not only the bearing life of the guides and drive mechanism, but also the required motor torque. In addition, the force of gravity on the load when starting and stopping will influence the inertia of the system, which also plays a role both actuator selection and motor sizing.
In a vertical application, it is generally recommended to use two bearing blocks on each guide rail. This ensures that the assembly can support the pitch and yaw moment loads that arise during acceleration and deceleration. Similarly using an actuator with two guide rails in parallel will enable the actuator to handle any roll moments that arise from a load that is not even distributed, or from external forces due to the process. The best scenario, if space allows, is to choose an actuator that uses two guide rails with two bearing blocks each.
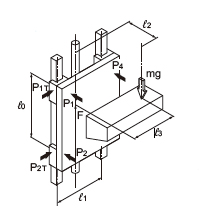
Image credit: THK
Buckling load
When using a ball screw or lead screw in a vertical application, the full load is experienced as an axial force, which can cause the screw to bend and, eventually, buckle under the load. The buckling load is determined by the screw’s root diameter, unsupported length, and end bearing arrangement. The end bearing arrangement has a significant influence on buckling load. The more rigidly fixed the screw assembly is, the higher its permissible buckling load will be. For example, a screw with a fixed-fixed bearing arrangement has 16 times the permissible buckling load than a screw with fixed-free end mounting.
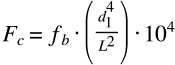
Fc = maximum compressive load (N)
fb = end bearing factor
d1 = root diameter of screw (mm)
L = unsupported length (mm)
Arranging the screw with the fixed bearing on the top will put the screw in tension, avoiding excessive compressive forces on the screw. Most ball or lead screw actuators are constructed with the fixed bearing on the driven (motor) end, but it’s important to check the bearing arrangement and ensure the actuator is mounted in such a way that the fixed bearing is on the top.
Back driving
For safety reasons, screws are preferred over belts or linear motors in vertical applications, as they help prevent a load from catastrophically crashing if there’s a loss of power to the motor. However, they can, and often will, back drive, depending on the screw’s friction, lead angle, and efficiency. (In general, lead screws have a lower tendency to back drive, due to their lower efficiencies.) The likelihood of a screw assembly to back drive can be determined by calculating the back driving torque and comparing it to the friction force of the assembly (drag torque of the nut, friction from the seals, and friction from the end bearings). If the back driving torque is less than the assembly’s friction, the load is unlikely to cause back driving.
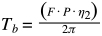
Tb = back driving torque (Nm)
F = axial load (N)
P = screw lead (m)
η2 = reverse efficiency (0.8 to 0.9 for ball screws)*
*Efficiency when back driving is typically less than the efficiency for normal operation. Be sure to check the manufacturer’s specification for the back driving efficiency.
Lubrication
Most bearings and actuators have lubrication ports on all four sides, primarily to accommodate access in case there are obstacles that block one or more port. For some designs, the orientation of the assembly also dictates which lubrication ports should be used. Since gravity is a hindrance to lubricating the upper tracks of a linear guide or the uppermost raceways of a screw, it’s especially important to check the manufacturer’s lubrication guidelines for vertical mounting. In many cases, manufacturers will recommend against using oil in a vertical application. For grease lubrication, the assembly will often have specially metered lubrication pathways, to ensure the grease reaches all critical surfaces.
Image credit: Bosch Rexroth
Contamination
Actuators in a vertical orientation have the benefit that liquid contamination will typically drain away, reducing the risk of corrosion. However, very fine, light particulates, such as fiberglass and ceramic powder, are more likely to adhere to bearing surfaces and simply be “pushed” along by end seals, causing a build-up of contamination and increasing the risk of entry into the bearings. To ensure the best protection in vertical applications, linear guides with both front and side seals should be used. Also choosing an actuator with its own sealing or covering mechanism (preferably a full-contact seal rather than just a cover plate) provides additional protection against both airborne and liquid contamination.

You mention that :
[ a screw with a fixed-fixed bearing arrangement has 16 times the permissible buckling load than a screw with fixed-free end mounting.]
However you also mentioned that fixed bearing must be placed on the top across the motor.
Is it okay to use fixed-fixed bearing in vertical application or it will end up compressşon to ball screw and bending due to having fixed bearing at bottom ?
Or fixed bearing on top neutralise the fixed bearing at the bottom ?
please support the vertical application of lead screw selection