

Image credit: PBC Linear
Belt driven linear systems are common in applications that require long travel and high speed, such as gantry robots and material handling and transport. The motors of choice for these systems are often servo motors, for their ability to accurately control position, speed, and torque.
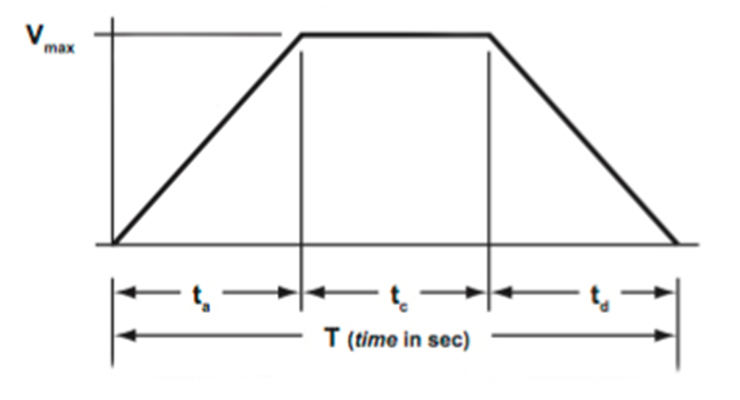
Sizing and selecting the servo motor requires determining both the continuous and intermittent drive torques required for the application. The continuous torque is calculated by taking the root mean square of all the torque requirements throughout the application — torque required for acceleration, torque for constant velocity, and torque for deceleration. In most applications, the maximum (intermittent) torque occurs during acceleration.
To determine the root mean square (continuous) torque, we first calculate the torque values required during each phase of the move profile.
Torque required for constant velocity
For a belt drive system, the motor torque required during constant velocity is simply the total axial force (Fa) on the belt multiplied by the radius (r1) of the drive pulley.
Tc = torque required during constant velocity (Nm)
Fa = total axial force (N)
r1 = radius of drive pulley (mm)
η = efficiency of belt drive system
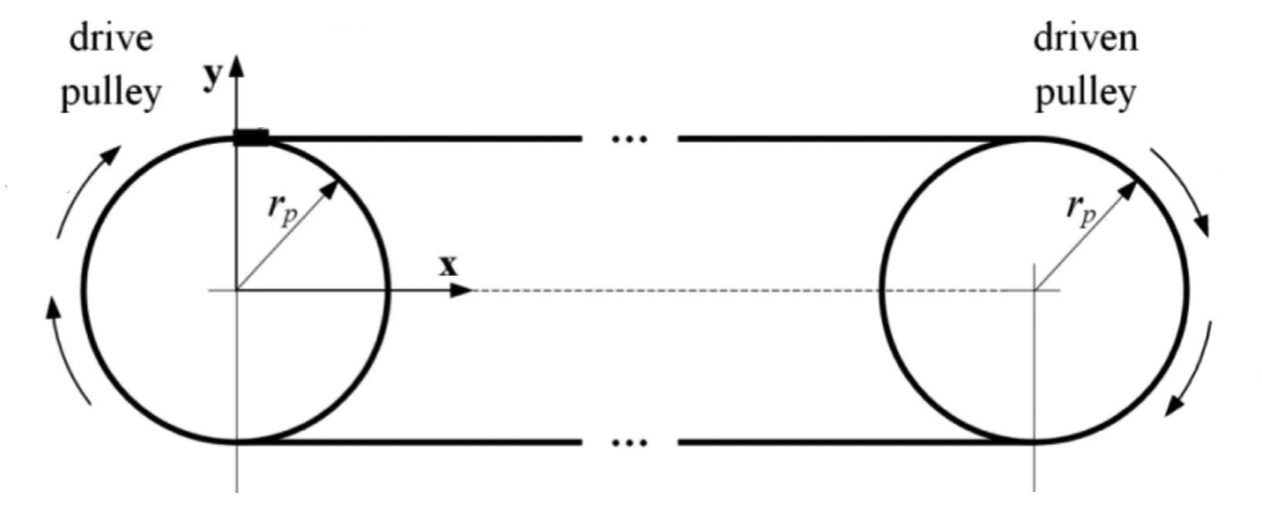
Notice that the efficiency (η) of the belt drive system is included in the torque equation. This efficiency accounts for losses such as friction between the belt and pulleys. Also note that we’ve assumed the drive and idler (driven) pulleys have the same radius, which is often the case for belt driven linear motion systems.
 Unlike screw drives, which often encounter axial forces due to external operations such as pressing or drilling, belt drives aren’t designed to withstand external axial forces. So the total axial force for a belt drive system consists only of the force required to move the load, which is the weight (m*g) of the load (both the external load and the belt) multiplied by the coefficient of friction (μ) of the guide supporting the load.
Unlike screw drives, which often encounter axial forces due to external operations such as pressing or drilling, belt drives aren’t designed to withstand external axial forces. So the total axial force for a belt drive system consists only of the force required to move the load, which is the weight (m*g) of the load (both the external load and the belt) multiplied by the coefficient of friction (μ) of the guide supporting the load.
![]()
m = mass of moved load (external load plus belt) (kg)
g = gravity (m/s2)
μ = coefficient of friction of guide
Torque required for acceleration
The acceleration phase of the move profile is typically the period when maximum torque is required from the motor, and this torque value, Ta, is often taken as the intermittent torque.
The torque required during acceleration includes the torque required at constant speed plus the torque required to accelerate the load.
![]()
Ta = total torque required during acceleration (Nm)
Tacc = torque required due to acceleration (Nm)
The torque due to acceleration is found by multiplying the total inertia of the system (Jt) by the angular acceleration (α). ![]()
Jt = total inertia of the system (kgm2)
a = angular acceleration (rad/s2)
The total system inertia includes the inertia of the motor (because the motor has to overcome its own inertia), coupling, pulleys, and load.
![]()
Jm = inertia of motor (provided by manufacturer) (kgm2)
Jc = inertia of coupling (provided by manufacturer) (kgm2)
Jp1 = inertia of drive pulley (provided by manufacturer, or calculate) (kgm2)
Jp2 = inertia of idler pulley (provide by manufacturer, or calculate) (kgm2)
Jl = inertia of load (kgm2)
Although we assumed above that the drive and idler pulleys have the same radius, their inertias may be slightly different, since the drive pulley is toothed and, therefore, has a slightly larger radius and higher mass than the idler pulley.
The inertia values of the motor, coupling, and pulleys are typically specified by their respective manufacturers. However, the inertia of the load must be calculated. Remember that the load includes the mass of both the external load and the belt, since the motor has to generate enough torque to overcome the inertia of the belt.
![]()
ml = mass of external load (kg)
mb = mass of belt (kg)
r1 = radius of drive pulley (mm)
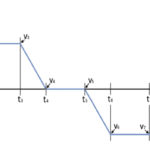
For the angular acceleration, we assume that the system is accelerating from zero to some maximum velocity, with N being the maximum angular velocity and t being the time to accelerate.
![]()
N = maximum angular velocity (rpm)
t = time for acceleration (s)
If the system is accelerating from a non-zero velocity, then the equation would simply incorporate the change in velocity (ΔN) divided by the time over which the velocity increase occurred (Δt).
Torque required for deceleration
The motor drive torque required for deceleration is equal to the torque at constant velocity minus the torque due to acceleration.
![]()
Td = torque required during deceleration (Nm)
Continuous torque
Now that we know the motor drive torques required during acceleration, constant velocity, and deceleration, we can take the root mean square of these values to determine the continuous torque required by the motor.
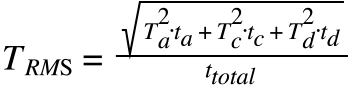
TRMS = root mean square (continuous) torque (Nm)
ta = time for acceleration (s)
tc = time for constant velocity (s)
td = time for deceleration (s)
ttotal = total time for move (including any idle time between moves) (s)
Feature image credit: Rollon S.p.A.



Amazing. Thanks for sharing such an insightful post.