
Ethernet networks are ubiquitous in our daily lives — allowing computers in office, school, and commercial environments to connect to the internet, share files, and access printers and other hardware connected to the network. And there’s a reason Ethernet is so popular — it’s a simple, flexible network protocol that facilitates high-speed data transmission. But despite its overwhelming adoption, a key function of Ethernet — the routing and delivering of data — doesn’t provide the real-time, deterministic performance required for many industrial applications, such as motion control and automation. This is why Industrial Ethernet was developed.
Real-time: A real-time network must specify a maximum amount of time in which the system transmits data. (In contrast, a non-real-time system runs at a consistent speed, with no deadline.) Real-time systems can be hard real-time or soft real-time. A hard real-time system cannot miss any deadlines. If the response time limit is exceeded, the system will experience a failure. A soft real-time system, on the other hand, can tolerate occasional violations of the response time limit.
Deterministic: A network is deterministic if it can guarantee that data will be transmitted in a specified, predictable amount of time — not faster or slower.

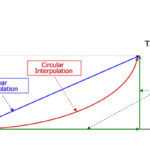
Image credit: Analog Devices, Inc.
Industrial Ethernet isn’t just one network protocol — it’s a term that describes various Ethernet-based network protocols developed specifically for industrial applications. But one thing that Industrial Ethernet networks have in common is their use of the physical hardware and internet protocols of standard Ethernet (taking advantage of its low cost and simplicity), with adaptations to other aspects of the Ethernet framework that provide various levels of real-time, deterministic communication between controllers, actuators, sensors, and other connected industrial devices.
Here’s an overview of six common Industrial Ethernet networks that you might encounter when designing and integrating linear motion systems, along with the main differentiators of each.
CC-Link IE: The Industrial Ethernet adaptation of the CC-Link network provides high-speed, real-time data exchange with a simpler hardware structure than some other IE networks. There are several variations of the CC-Link IE network, including CC-Link IE Field, primarily for field devices, and CC-Link IE Control for handling data at the controller level, as well as versions for safety controllers and for synchronized motion control applications.
EtherNet/IP: Ethernet/IP is the only Industrial Ethernet network based entirely on the Ethernet standard. (Note that the “IP” stands for “Industrial Protocol.”) This keeps its cost low and makes it familiar and easy to use for IT personnel. The “industrial” part comes from a special application layer, known as CIP, the Common Industrial Protocol, which provides a method for organizing and representing data, managing connections, and facilitating messaging on a network. EtherNet/IP is simply CIP (the application layer) implemented over standard Ethernet

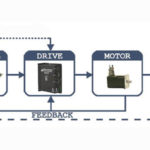
Image credit: PCMag Digital Group
Industrial networks are often depicted as stacked sets of instructions — referred to as layers — that define how hardware and software on the network interact to transmit and manage data. The application layer is the “top” layer in the instruction stack — it facilitates the interaction between programs or applications and the network.
Although the basic form of EtherNet/IP doesn’t provide real-time performance or guarantee data exchange within a specific time frame, several network extensions have been developed — known as CIP Motion and CIP Sync — that allow it to achieve real-time, deterministic communication within the Ethernet standard.
DeviceNet: Just as EtherNet/IP is CIP implemented over standard Ethernet, DeviceNet is CIP implemented over a CAN network. DeviceNet is primarily used for connecting many lower-level devices, such as switches and actuators, to a controller with a single cable that carries both power and data. With DeviceNet, up to 64 nodes, or devices, can be connected over a single network at a distance of up to 500 m, with a data transmission rate of 125 kbps.
EtherCAT: EtherCAT provides deterministic, hard real-time communication, and is suitable for synchronized, multi-axis motion control “out of the box,” without requiring additional hardware to achieve synchronization between multiple axes.
ProfiNET: ProfiNET is available in several versions, but the version termed ProfiNET IRT provides hard real-time communication with cycle times as low as 250 μs, making it well-suited for motion control applications.
SERCOS III: SERCOS stands for SErial Real-time COmmunication System, and as the name implies, it delivers deterministic, hard real-time communication with cycle times as low as 32.5 μs and a high degree of flexibility in topology. It also provides a fully redundant structure so that the network continues to operate even if there’s a cable break along the network.



Leave a Reply
You must be logged in to post a comment.