
Piezo motors and actuators are used in a variety of medical applications, including liquid handling robots for laboratory testing and diagnostics, drug discovery, and biotechnology.
Liquid handling functions in the medical industry have traditionally been done manually by laboratory personnel. But consistency and accuracy are difficult to ensure with manual methods, since variations between technicians (and even between individual processes by the same technician) are inevitable. And manual pipetting for multiple hours each day can cause repetitive strain injuries and introduces the risk of accidents, such as spills or misapplications. For these reasons, automated liquid handling robots have become widely accepted, not only in large pharmaceutical labs and testing facilities, but in smaller-scale laboratories and medical offices as well.

Image credit: Opentrons
Automated liquid handlers ensure consistency, accuracy, and safety, without the variations in process or timing that plague manual dispensing methods. And as typical dispensing volumes move from microliters (1.0 x 10-3 mL), to nanoliters (1.0 x 10-6 mL), all the way down to picoliter (1.0 x 10-9 mL) amounts, automated liquid handling robots can provide the speed and precision necessary to achieve high throughput while handling these minute volumes of liquids.
Liquid handling terminology
In the medical industry, the device that transfers the fluid is typically a pipette, although needles and pins can also be used to transfer fluids.
The process of taking in the liquid to be transferred is referred to as aspiration, and the processes of expelling the liquid into the target container can be referred to as either dispensing or pipetting.
Pipetting typically refers to a method of dispensing in which there is contact between the pipette tip and the receiving container or fluid, with surface tension holding the liquid in place once the pipette is retracted. Pipetting also typically implies that all the liquid that is aspirated is expelled in one dispensing cycle.
When the term “dispensing” is used, it typically implies that the process is non-contact — that is, there is no contact between the pipette tip and the receiving container or liquid. Dispensing can also refer to a process in which a certain volume of liquid is aspirated, and the liquid is expelled in smaller amounts to multiple targets over multiple dispensing cycles. The process of aspirating enough total volume to expel more than once from the same pipette is often referred to as aliquoting.

Image credit: PerkinElmer
Automated pipetting
Pipetting, or contact dispensing, is the most common method for dispensing microliter and nanoliter volumes of liquids. In automated systems, the liquid is typically dispensed into a microplate — a small plate with evenly spaced “wells” arranged in rows and columns. The most common microplate formats are 96-well (8 rows x 12 columns), 384-well (16 rows x 24 columns) and 1536-well (32 rows x 48 columns). Regardless of the number of wells, the dimensions of the microplate remain the same, at approximately 128 mm x 85 mm.
The most common format is the 384-well plate, but more applications are moving to the 1536-well format to increase throughput and reduce the volume of samples and reagents required for each test. To enable this, dispensing heads often include multiple pipettes, referred to as channels. Multichannel dispensers typically include 6, 8, or 12 channels in one dispensing head. In these applications, a Cartesian robot or gantry system positions the dispensing head in the X and Y directions over the microplate and then moves the individual pipette tips vertically into position above the target wells.
The X-Y motion of the dispensing head is mostly unaffected by the microplate format, since the plate dimensions are the same regardless of the number of wells. But as the number of wells on the microplate increases (from 96 to 384 to 1536), the distance between wells decreases, and the system that controls the Z-axis motion of the individual channels must be even more precise. The dispensing head must also be more and more compact to allow the individual pipette tips to align with the wells on the plate. This is important not only for accurate dispensing, but also to avoid hard contact between the pipette tip and the well. Piezo motors are the perfect solution to meet the requirements of both compact dimensions and high-precision positioning.

Image credit: Tecan
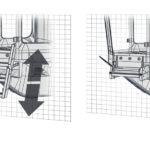
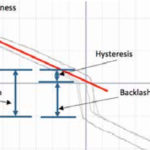
Even small-diameter ball and lead screws can be too bulky once motors and other components are assembled. And at small diameters and leads, high speeds become difficult to achieve, not to mention the effects of friction and backlash that degrade positioning accuracy and repeatability.
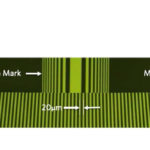
For liquid handling applications, linear ultrasonic piezo motors can provide stroke lengths up to 100 mm, with resolution of less than 10 microns, to move pipette tips into the optimal position for accurate contact dispensing. Because piezo motors are direct drive, they don’t suffer from mechanical losses, and their high dynamics allow them to produce the forces required for quickly extending and retracting the pipettes for high-throughput dispensing.

Leave a Reply
You must be logged in to post a comment.