
Technically, the term “servo” refers to a function rather than a specific type of device. A servo system is one in which the system’s error (in positioning, speed, or torque) is corrected through feedback that compares the system’s actual performance with its commanded performance. A servo motor, then, is one that incorporates a feedback device (such as a resolver or encoder) whose output is compared to the command signals sent to the motor by the controller.
Components of a servo system
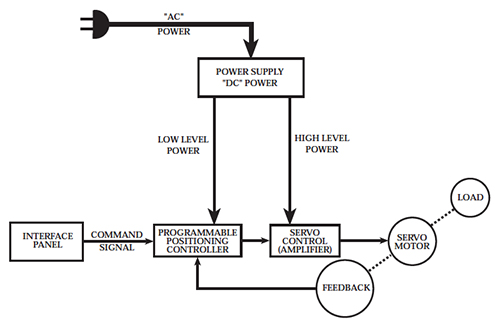
Servo systems include three primary components: a motor, a drive (also referred to as an amplifier), and a feedback mechanism. Also typically included are a power supply and a servo controller capable of controlling either a single axis or coordinating the motion of multiple axes.
Servo motors can be either AC or DC types, with AC servos being more suitable for constant speed applications and DC servos for variable speed applications. DC servo motors can also be either brushed or brushless.
Feedback is typically provided by an encoder—either internal or external to the motor—or a resolver. In applications that require very precise positioning, two feedback devices may be used—one on the motor to verify the motor’s performance, and one on the load to verify the load’s actual position.
A servo drive amplifies the signal from a master controller to provide sufficient current (power) to the motor to generate speed and produce torque. In a rotary motor, current is proportional to torque, so the servo drive directly controls the torque produced by the motor. Similarly, in a linear motor, current is proportional to force, so the drive controls the force produced by the motor.
The servo controller (also referred to as a motion controller) can be thought of as the brain of the servo system. This is where the motion profile, including the desired acceleration, speed, and deceleration, resides. The controller sends signals to the drive, which causes the motor to execute the desired motion. The controller also has the important task of closing the loop on the system by constantly reading the encoder feedback and modifying the signal to the motor (through the drive) to correct any errors in the actual versus desired position, speed, or torque.
Tuning
A key feature of servo systems is their need for “tuning,” which in the simplest sense, means adjusting the system’s gain and bandwidth for optimal performance. Gain is the ratio of output to input, or put another way, it is the measure of amplification of the input signal. Gain affects the accuracy of the system—how close to the desired speed, torque, or position the motor is able to achieve. High gain allows small, accurate movements.
Bandwidth is expressed in frequency and indicates how fast the system can respond to command and feedback signals. A wider bandwidth (higher frequency) gives a faster response, which is good for highly dynamic applications. While both higher gain and higher bandwidth are desirable in theory, both attributes are limited by the resonance of the system and by the ability of the components to withstand high power.
Characteristics of servo motors
Servo motors are able to operate at a wide range of speeds—both high and low—without overheating, and to maintain sufficient torque at zero speed to hold a load in place. They can also maintain a constant velocity, despite changes in the amount of torque acting on the system.
Torque control is also possible with a servo motor, and servos are often defined by their speed-torque curves, which indicate the motor’s peak and continuous torque values. Peak torque is the maximum torque the motor can generate for a short amount of time, while continuous torque can be produced indefinitely. If a servo motor is operated above its continuous torque rating for a significant amount of time, excess heat is generated, which will damage the motor’s circuitry. Operating a servo motor above its peak torque can demagnetize the magnets.
Feature image credit: Kollmorgen

Nice Information