
The most notable stepper motor performance characteristics are precise positioning, good holding torque, and good low-speed torque characteristics. But in some cases, application parameters necessitate high torque production at high speeds, while design or control constraints dictate the use of a stepper motor. Although stepper motors aren’t notable for their ability to produce high torque at high speed, it is possible, in some applications, to achieve both.
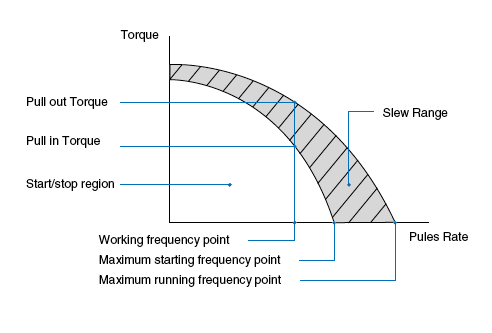
Image credit: Moons’ Industries
Why do stepper motors have trouble producing high torque at high speeds?
For a given stepper motor design, torque production is primarily a function of current through the motor windings — the higher the current, the more torque the motor produces. But motor windings have two properties that limit current and, therefore, torque production. The first is inductance (L), which causes the winding to resist any change in the current running through it. The other is resistance (R), which limits the maximum amount of current that can be carried by the winding.
Together, these two properties determine the motor’s electrical time constant (τe), which is the time it takes for the current in the winding to reach 63 percent of its rated (maximum) value.
![]()
When the rate of voltage pulses delivered to the windings (and, hence, the motor speed) is slow, the windings have sufficient time to reach their rated current, and the motor can produce its rated torque. But when the rate of voltage pulses (motor speed) is high, the current in the windings doesn’t have sufficient time to reach its rated value, and torque production is compromised.
Another factor that limits stepper motor torque production at high speed is the rate of current rise in the windings (dI/dt), which is directly proportional to the applied voltage (V), and inversely proportional to the motor’s inductance (L).
![]()
To improve the rate of current rise, either the inductance of the windings (L) must be lowered, or the applied voltage (V) must be increased.
Lowering the winding inductance requires changing the motor’s design and/or manufacturing methods. Indeed, some manufacturers have made changes to their motor construction and manufacturing processes and now offer stepper motors with higher torque-speed characteristics than traditional designs. Examples of these changes include improved magnetic designs that increase the flux between the rotor and stator, increasing the number of pole pairs in the motor, and increasing winding density.
But for machine builders and end users, torque production for a given stepper motor can often be improved by using a chopper drive.
Chopping the drive voltage provides better torque-speed characteristics

Image credit: PBC Linear
Chopper drives supply a high level of voltage (often up to eight times the nominal voltage) to the motor, which, according to Ohm’s law (current = voltage ÷ resistance), results in higher current through the windings.
![]()
When the drive senses that the current has reached a predetermined value, the voltage supply is switched off, or “chopped.” And when the current falls below a certain level, the high voltage supply is switched on again.
This method of voltage chopping also improves the rate of current rise (dI/dt). So by increasing the driving voltage, the windings can reach a higher current level — even when the pulse rate is high, meaning more torque is produced at higher speed.
Chopper drives are sometimes referred to as constant current drives, because they produce a (relatively) constant current in the windings, rather than the traditional drive method of supplying constant voltage to the motor. This method of “chopping” the current also enables microstepping control for stepper motors.


Leave a Reply
You must be logged in to post a comment.