
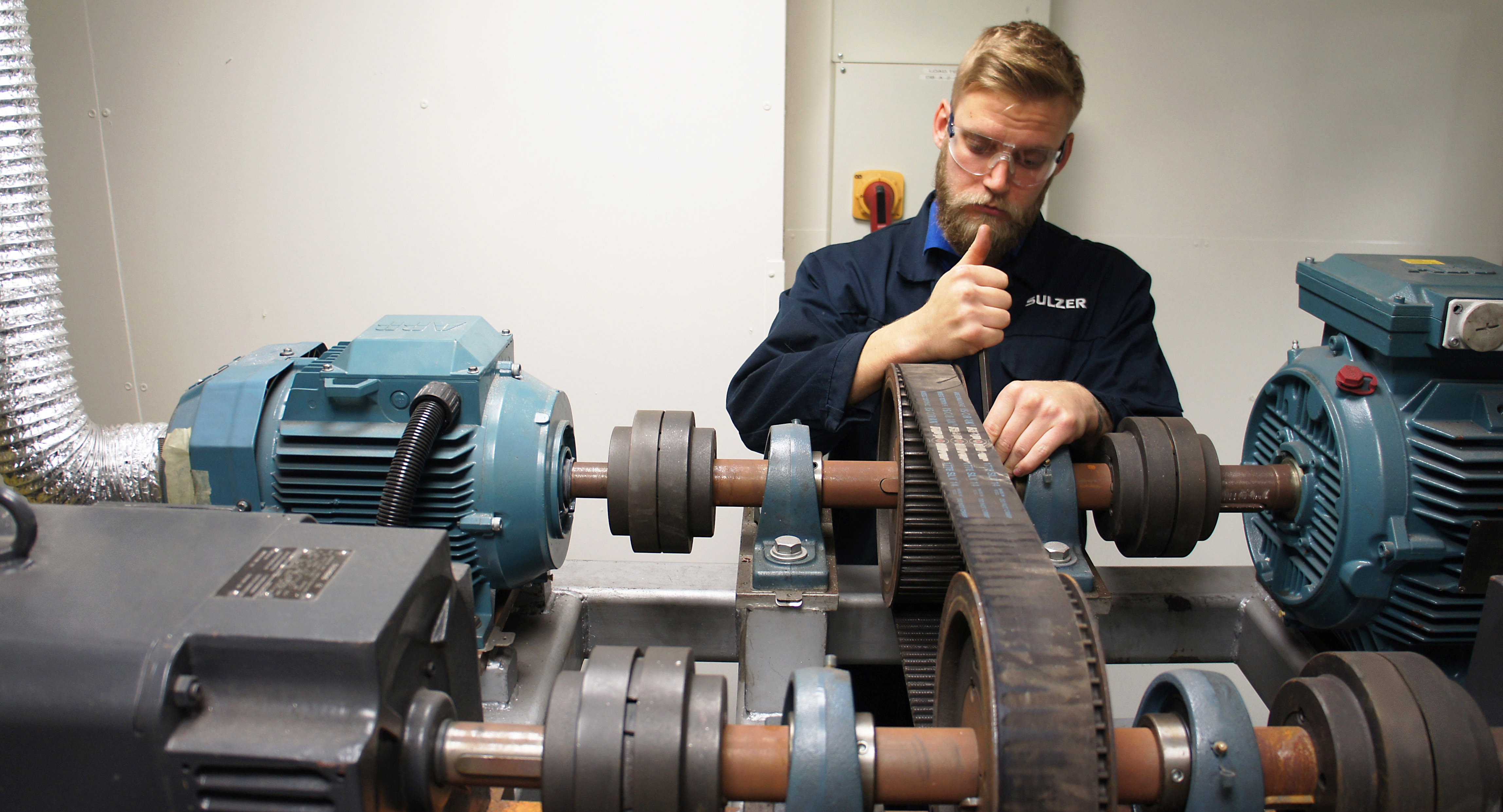
Power transmission in linear motion designs is often through rotary-to-linear devices, chain, or belt drives. The earliest belt iteration — and one that’s still economical today — is the friction-based V-belt design. These pair a belt with a pulley (often on an electric motor’s geared output shaft) to provide reliable operation in myriad end-user and industrial designs.
Modern V belts are rubber, urethane synthetic, and neoprene designs with either a V or trapezoidal profile. The latter increases the amount of contact between V belts and pulleys to minimize tension needed to transmit torque. Even so, polyurethane outperforms rubber thanks to its higher resistance to chemicals and adaptability to specialized profiles. (Polyurethane also boosts the shear strength of the teeth on synchronous belts covered in this article’s next section).
A V belt’s most important element — its tension-bearing top — includes fiber cords for strength to bear the actual traction load. Modern tension-member cords are often aramide, polyester, fiberglass, or even steel. Pre-stretched variations help minimize stretch. The cords embed into the main belt material that serves to hold the belt body together and shed heat. The part of most modern friction belts that engages the pulley is a compression section designed to actually wedge into pulley grooves as a way to boost engagement. In many instances, a rubberized fabric cover helps protect the belt and prevent slipping and overheating cords.
Though they’re versatile and forgiving, improperly sized friction-based belt drives can slip (tangentially on the pulley — a form of lost motion) and creep axially. That can make for unreliable speed output. Here are some things to remember if a V-belt drive makes the most sense for a motion axis: Output torque depends on belt resistance to tension and belt-pulley adherence. The latter is why oils and greases must be kept away from belt drives — or threaten drive failure due to slipping.
Be prepared to specify V belts by cross section (including the belt’s top width, V angle, and depth) and overall pitch length (defined as a circumferential length along a belt’s pitch line). Then suitable V belts are narrowed further by which have sufficient power ratings (determined by rpm and sheave speed) to satisfy design demand of nominal horsepower (to be transmitted or output at the motor) with application of a service factor.
Sound complicated? In fact, industry has simplified much of this with references that list fairly specific V-belt service factors that adjust for typical levels of special application demands and losses from variable loads and rpm, heat, environmental conditions, and shock and vibration.
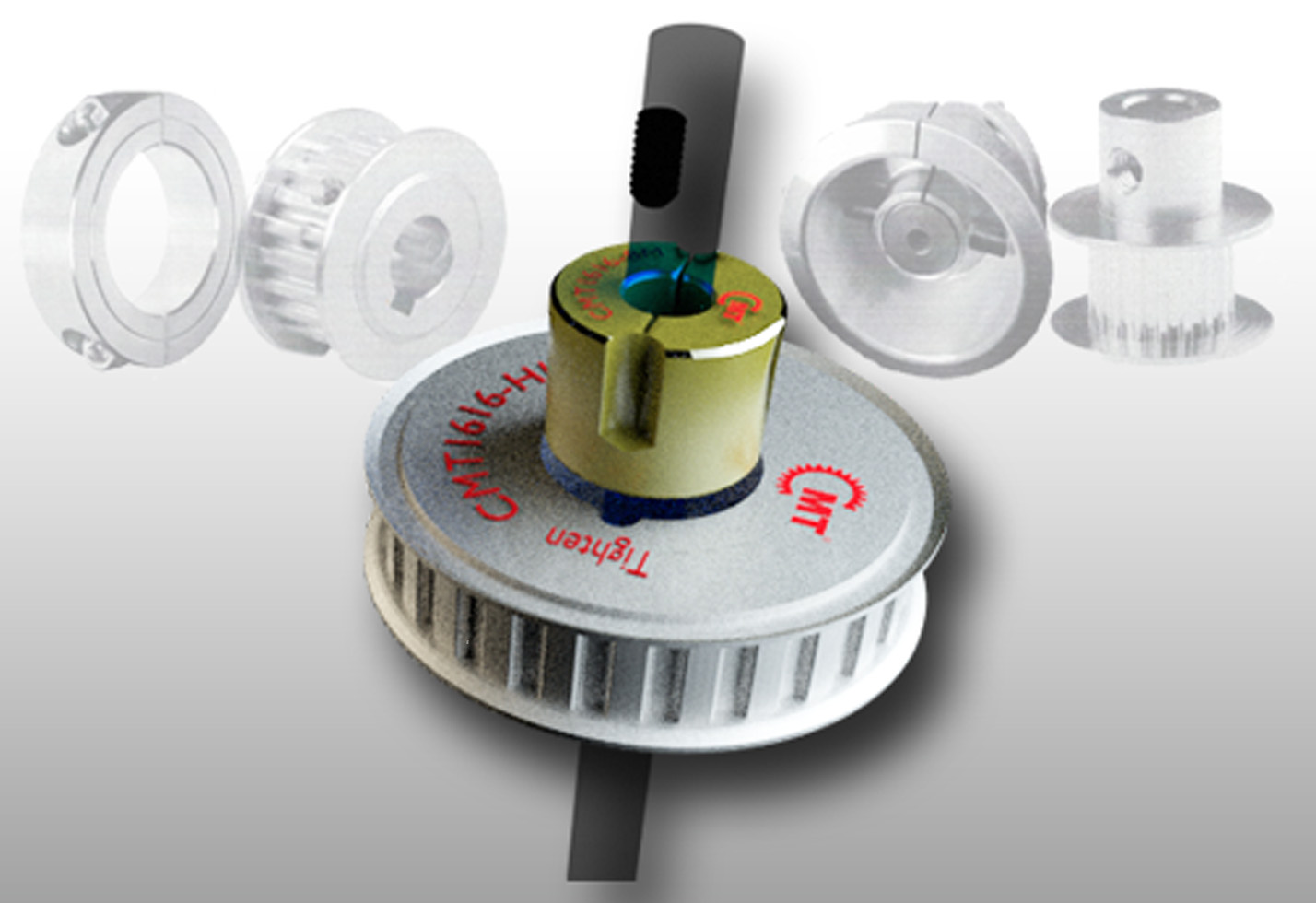
Where friction belts are insufficient for a motion design — as on positioning table, conveyor, and printing-machine axes needing true synchronous operation, for example — toothed synchronous belts excel. Such belt drives are also indispensable in compact designs that need power-dense linear drives in awkward or compact design envelopes.
As with V belts, be prepared to specify synchronous belts by length and axis power demand. Here, additional factors include the teeth’s maximum shear strength (dictated by their cross section as well as pulley-engagement dynamics). On the topic of teeth engagement, remember that synchronous belt drives need tooth clearances at the engagement with pulley grooves (so teeth can enter and exit channels sans interference). That’s why most synchronous belts exhibit some backlash. In addition, a synchronous belt’s tooth shear strength must be high enough to withstand maximum application torque demand. As with V-belt selection, service factors can help engineers pick synchronous belts having shear strengths to withstand the application’s worst expected shocks and loading.
Despite the extra considerations, synchronous belts are indispensable in precision motion designs. A mature technology is belting with teeth of a trapezoidal shape (not to be confused with V belts sporting trapezoidal cross sections) — although modified iterations are suitable for very precise positioning. More common in new designs are rounded profiles carry more load than belts with trapezoidal teeth. The belts do this in two ways: 1) They have inherently higher tooth shear strength and they 2) More evenly spread load over the belt’s tensile cords. Generic labels for synchronous belts with round-profile teeth are variations on the term high-torque drive or HTD for short — with the latter a trademark of belt and rubber-components manufacturer Gates Corp. In some cases, belts with round-profile teeth can triple horsepower ratings. Another design — belts with curvilinear teeth — help optimize pulley-tooth engagement and pressure angles to boost overall power transmission. Many such belts go into automotive applications, which come with tensile cords and in sizes unsuitable for industrial designs.




Leave a Reply
You must be logged in to post a comment.