
Selecting the right servo motor for a linear motion system is a complex task, beginning with initial assumptions and component selections, which must be checked through a series of calculations and, in most cases, repeated over several iterations until a suitable combination of motor and mechanics is found. Most motor manufacturers offer online sizing tools that make the process easier, ensure that the best components are selected, and help preserve the design engineer’s sanity. But as a designer, or even an end user, it’s important to have an understanding of the three critical parameters of servo motor sizing: inertia, speed, and torque.
Inertia
Inertia is an object’s resistance to change in velocity. For servo sizing, the ratio of the load inertia to the motor inertia indicates how well the motor can control the load during acceleration and deceleration. Every rotating component in the system contributes to the inertia that the motor must overcome. This generally includes the actuator or drive (ball screw, belt, rack & pinion), the external (moved) load, and the coupling.

JL = inertia of load reflected to motor
JD = inertia of actuator or drive (ball screw, belt, rack & pinion)
JE = inertia of external (moved) load
JC = inertia of coupling
When a gearbox is used in the system, its inertia must also be included. However, the addition of a gearbox reduces the inertia of the load components (actuator, load and coupling) by the inverse square of the gear ratio.
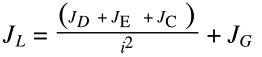
JG = inertia of gearbox
i = gear ratio
In theory, a “perfect” inertia match of 1:1 should be the goal, but this is rarely achievable or practical. A common rule of thumb for servo sizing is to strive for an inertia ratio of 10:1 or less.
Speed
The system’s motion profile—the amount of time it spends in acceleration, deceleration, and constant speed—can usually be approximated by either a triangular or trapezoidal graph representing speed versus time.

Because belt driven systems typically have a high lead constant (distance traveled per pulley rotation), it’s common to add a gearbox to increase the motor speed. For example, if the lead constant of a belt driven system is 100 mm and the application’s maximum speed is 1 m/s, the motor’s maximum speed will be only 10 rotations per second, or 600 rpm. Adding a gearbox with a 3:1 ratio will increase the required motor speed to 1800 rpm, and may also provide a more desirable inertia match.
Torque
Taken together with speed, torque is probably the most vital factor in servo motor sizing. There are three components of torque that are important: torque due to acceleration, torque due to the load, and torque due to friction. Based on these components, two calculations can be made: maximum torque and RMS (Root Mean Square) torque. These are compared to the motor’s torque-speed curve, which shows the motor’s continuous and intermittent operating zones.
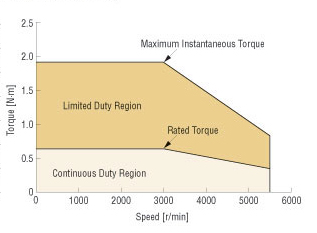
Image credit Oriental Motor U.S.A. Corp.
Maximum, or peak, torque typically occurs during acceleration and contains all three components—acceleration, load, and friction. This is also where the iterative nature of motor sizing comes into play, as the acceleration torque is based on the total inertia of the system, including the motor inertia. But since the motor is unknown, a preliminary selection must be made and its inertia factored into the torque equation. Max torque may fall into the intermittent operating zone, since it is required for only a short period of time.
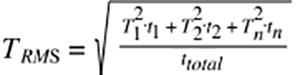
RMS torque is the time-weighted average of the different torque values needed over the full duty cycle, including any dwell time. The required RMS torque should fall within the motor’s continuous operating zone to ensure the motor doesn’t experience overheating.
Most designers and end users will, understandably, rely on a manufacturer’s sizing software when selecting a servo motor. But an awareness and understanding of the three fundamental components to servo motor sizing can provide insight that leads to better decisions in motor selection, which ultimately leads to a better-performing, more cost-effective system.

Leave a Reply
You must be logged in to post a comment.