
Multi-axis systems can be designed and built with either serial kinematics or parallel kinematics. In systems built on the principle of serial kinematics, one axis sits on top of another axis, and each axis is driven individually, independent of the others. Cartesian robots are a good example of serial kinematic design. In parallel kinematic systems, multiple axes work together to move a common platform or end effector. The movement of one axis is constrained by the other axes, forming a type of closed-loop kinematic chain. Delta robots use parallel kinematics.
Hexapod robots are a type of parallel kinematic mechanism with six degrees of freedom: X, Y, Z, roll, pitch, and yaw.
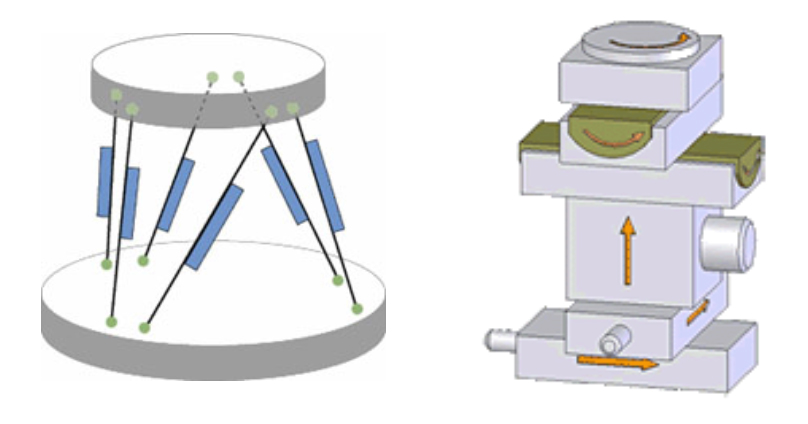
Image credit: Physik Instrumente
The term hexapod translates from Latin as “six feet,” and the hexapod robot, fittingly, consists of six actuators (also referred to as “legs”) that connect a stationary platform (typically the base) with a moving platform (typically the top). The legs are extending-rod style actuators — also referred to as “prismatic” actuators — which can be driven by ball screws, roller screws, linear motors, or even piezo devices. Ball or universal joints connect the ends of the actuators to the stationary and moving platforms.

Image credit: Russ Ottens
Some manufacturers and experts refer to hexapod robots as simply “hexapods.” But the term hexapod also refers to a six-legged arthropod. To avoid confusion, we use the more specific term “hexapod robot.”
The first practical applications for hexapod mechanisms were in tire testing and flight simulator equipment, both of which still use hexapod robots today. But hexapod mechanisms are also widely used in photonics and optical alignment, positioning for machine tool equipment, and inspection systems.
Hexapod robots are unique among multi-axis systems because they allow a user-defined center of rotation, or pivot point, for all six axes of motion. They also have much higher stiffness and load-carrying capability than serial kinematic robots (Cartesian, SCARA, or 6-axis) because their actuators, or “legs,” work together to support the load. The parallel design also means that the errors of each actuator are averaged, rather than accumulating as they do in serial robots.
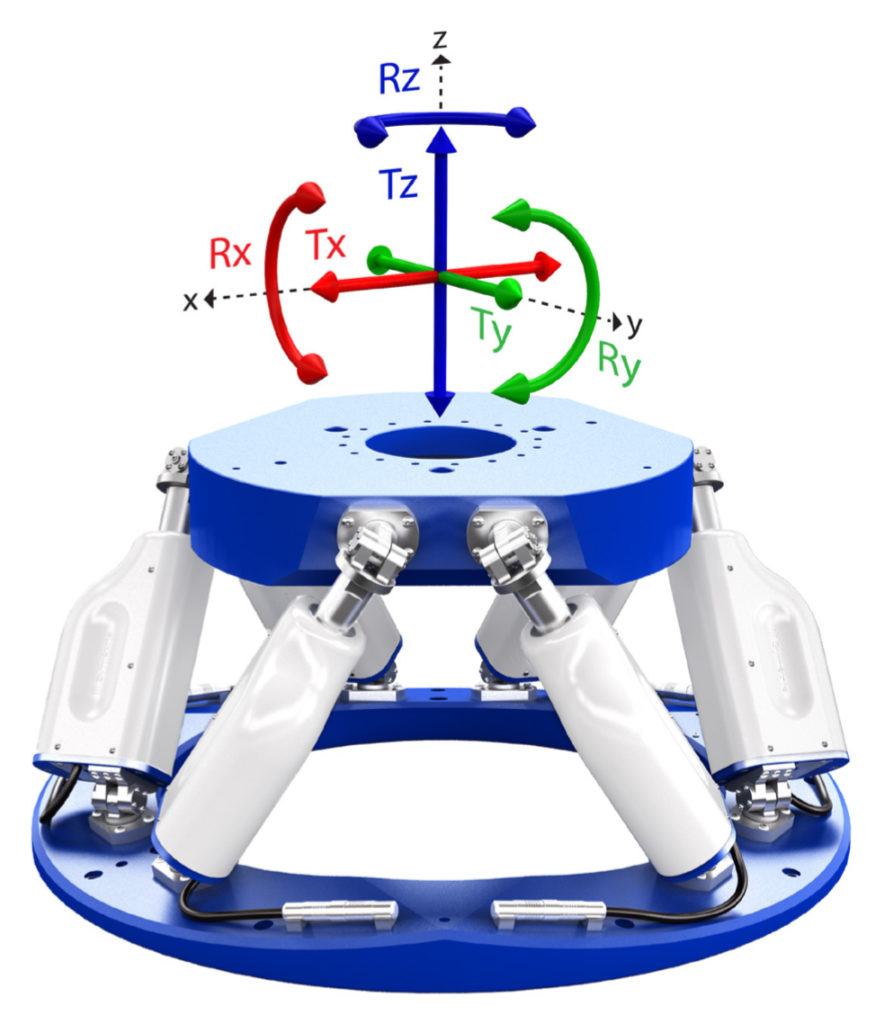
Image credit: Symetrie
Because only the top platform moves — motors, gearboxes, and other transmission components are stationary — hexapod robots have much lower inertia that serial designs, making them very well-suited for highly dynamic moves with large payloads, or for sub-micron precision with light loads. From an integration standpoint, hexapod robots are easier and faster to commission. Controllers typically allow a simple input for the pivot point, and hexapod robots often forego servo tuning, since there is only one moving platform and system stiffness is inherently high. And if tuning is required, the parameters for all six axes are identical, making the tuning process much easier and faster than with serial robots.
Image credit: wikipedia.org
Hexapod robots are sometimes referred to as Stewart platforms, but Stewart platforms were originally defined as having actuators connected in pairs at either the stationary or moving platform (or both).
Hexapod devices are analyzed using reverse kinematics. In other words, rather than the displacement of the moving platform being determined by the actuator movements, the actuator movements are determined based on the displacement of the platform. Reverse kinematic analysis is necessary due to the fact that a given set of actuator displacements can result in 40 different platform positions, but each unique platform position corresponds to only one set of actuator displacements.
The kinematics of hexapod devices also give rise to singularities, or positions where the platform becomes uncontrollable and its position cannot be uniquely determined by fixing the displacements of the actuators. (In extreme cases, a singularity may cause the entire system to effectively collapse.) But users of hexapod robots rarely have to deal with the issue of singularities, since manufacturers define the robot’s working area to a space that does not include any points of singularity.
The term “Stewart platform” comes from Mr. D. Stewart, who proposed to the UK Institution for Mechanical Engineers in 1965 that hexapod mechanisms be used as flight simulators. However, Mr. Stewart was neither the inventor of hexapod mechanisms nor the first to put them to use in a practical application. To find out why a type of hexapod robot is named for him, check out this article on the origins of parallel robots.





Leave a Reply
You must be logged in to post a comment.