

Image credit: Rockwell Automation
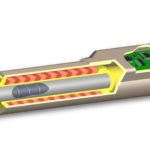
Linear motors are often described as rotary motors cut open and rolled out flat, so they produce motion in a straight line along one axis. Their construction is relatively simple, with a primary part (also referred to as a forcer) that contains windings, and a secondary part that contains magnets. The primary part is typically the moving part, and the secondary part is typically stationary. In iron core linear motors, the secondary part is laid out like a track, and in ironless designs, the secondary part is often constructed with two magnet tracks facing each other and the primary part riding between the two magnet tracks. Support for the moved load is provided by recirculating linear guides or air bearings.
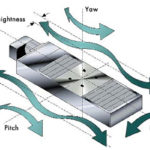
Planar motors are built on the same basic principle as traditional linear motors, but a key difference between traditional linear motors and planar motors is that the planar design allows the moving part — often referred to as a tile — to travel in two horizontal directions, X and Y (hence, the term “planar” motors). And instead of moving only in straight lines, the tiles can move in free-form patterns that include diagonals and curves. In some planar motor designs, the tiles can also tilt and rotate and even make small movements in the vertical (Z) direction.

Image credit: Planar Motor Incorporated
Two designs of planar motors exist. In the first design, the tiles (also referred to as movers or floaters) contain iron cores embedded in epoxy, with windings and permanent magnets, while the stationary stator contains a toothed structure with sets of teeth arranged at right angles to each other in the X-Y plane. The tiles also include nozzles for an air bearing system, which provides support for the tiles and the moved load. Although this design is relatively simple to implement, each tile requires motor and feedback cables, as well as pneumatic lines for the air bearing system, so cable management is necessary for each tile.

Image credit: Schaeffler
Another planar motor design uses a 2D coil matrix in the stator to produce 3D magnetic fields, which lift the tiles 1 to 5 millimeters above the stator surface. Because the tiles can “levitate,” this design is sometimes referred to as a “maglev” motor. The benefit of this planar motor design is that the tiles are completely passive — all the required cabling is connected to the stator, leaving the tiles free of the constraints of cables and cable management.
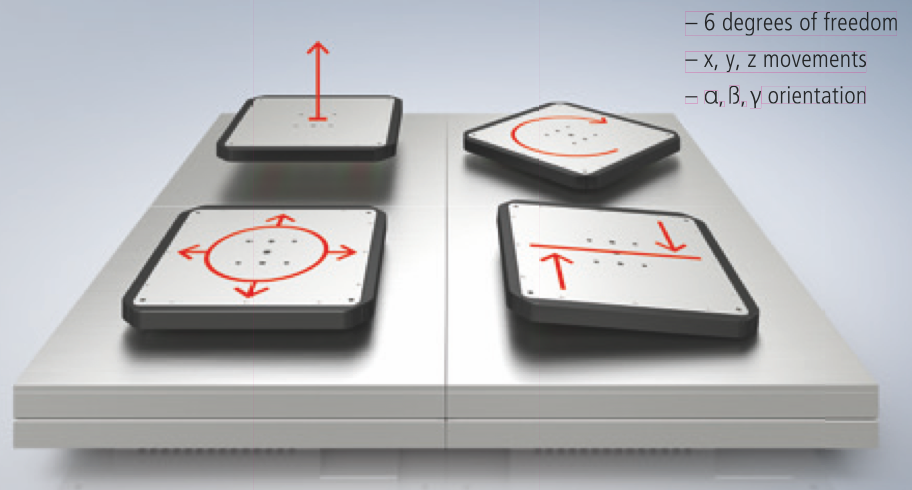
Image credit: Beckhoff Automation

Image credit: Planar Motor Incorporated
In both planar motor designs, there are no moving parts, so reliability is excellent, and the systems can be designed for extremely demanding environments, such as cleanrooms, vacuum environments, and hygienic applications. And planar motors can use multiple stators connected in virtually any pattern, from squares and rectangles to complex paths that traverse around other equipment or obstacles — much like the configurability of a conveyor system. Some designs can even be used in overhead (upside-down) and vertical (wall-mounted) orientations.
With virtually unlimited travel configurations and tiles that can move with six degrees of freedom, planar motors are being used as conveyors for light payloads and in assembly, inspection, and semiconductor and electronics applications.
Feature image credit: Beckhoff Automation


Leave a Reply
You must be logged in to post a comment.