
Piezo motors that produce linear motion include linear ultrasonic piezo motors, linear stepper piezo motors, and piezo inertia motors. Although their construction and principles of operation are different, all three designs harness the inverse piezoelectric effect — in which a piezo material expands or contracts when electrical energy is applied — to produce linear movement in a longitudinal rod.
How do you get a piezo motor to walk? One step at a time.
Linear stepper piezo motors are made up of several (typically four) piezo stack actuators mounted in a row. The four actuators, which can undergo two types of motion — expansion/contraction in length and sideways bending — are activated in pairs, analogous to legs.
When voltage is applied to the piezo motor, one pair of piezo elements (legs) extends downward and grips a longitudinal rod (also referred to as a runner) via friction elements on the ends of the legs. Next, the legs bend sideways, advancing the runner, and then contract to release the runner. As this is happening, the next set of legs is extending downward to grip the runner, advance it forward, and then retract.
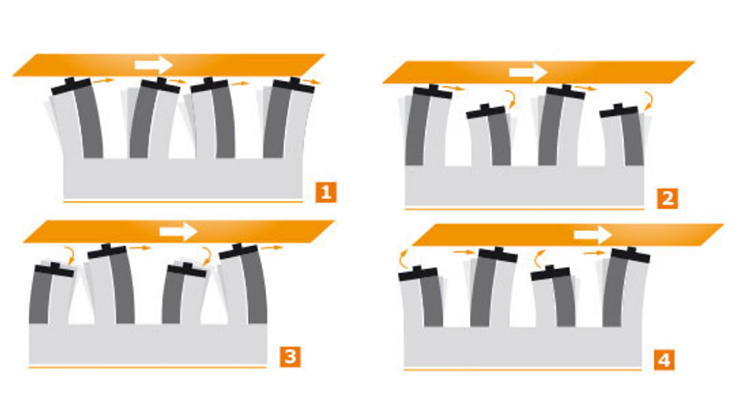
Image credit: MICROMO
The motion produced with each “step,” or cycle, is only a few microns, but linear stepper piezo motors make thousands of steps per second, so they can generate long stroke lengths at high speeds. (They can also travel at extremely slow speeds, in the range of a single micron per second, which is a requirement for precision dispensing and measuring applications.) Although the piezo actuators can produce unlimited linear motion, the stroke of a linear stepper piezo motor is limited by the length of the runner. Travel lengths up to 150 mm can typically be achieved, with maximum speeds up to 15 mm/s.
Linear stepper piezo motors can generate push/pull forces and holding forces of up to 10 N, and the legs can be preloaded to the runner to produce a self-clamping force with high stiffness, even when no voltage is applied.
Because piezo devices produce no magnetic flux, and all parts of the linear stepper piezo motor can be made from non-magnetic materials, they’re well-suited for environments with strong magnetic fields. And most designs use inorganic materials for insulation and electrical contacts, so they have very low outgassing and can withstand high bakeout temperatures, making them compatible with ultra-high vacuum environments.
Linear stepper piezo motors can be used to drive crossed roller slide stages, for extremely low friction and high stiffness. And because there’s no backlash in the driving mechanism (the piezo actuators), resolution in the nanometer and, in some cases, sub-nanometer (picometer) range can be achieved when microstepping control is used. This makes stages driven with linear stepper piezo motors ideal for microscopy and scanning applications.
In this video from PI (Physik Instrumente), as a linear stepper piezo motor “walks,” the carriage of a crossed roller slide is advanced forward, creating linear motion with nanometer resolution.




Leave a Reply
You must be logged in to post a comment.