
Discussions of industrial robots typically focus on three types: Cartesian, SCARA, and 6-axis. But there’s another robot design that is gaining prominence, especially in packaging and electronic assembly applications—the delta robot.
Parallel vs serial robots
Delta robots are a type of parallel robot, meaning that their motors and legs are connected mechanically in parallel, with each leg supporting only itself. In contrast, SCARA, 6-axis, and Cartesian styles are serial robots, meaning that each arm has to carry the next arm beyond it. For example, in an X-Y-Z Cartesian robot, the Y axis must support the Z axis, and the X axis must support both the Y and Z axes.
Note that the term “legs,” rather than “arms,” is typically used when discussing delta robots. This stems from their design, with a fixed base overhead and moving, jointed structures suspended from it, resembling a spider with spindly legs.
Delta robots operate on the basis of three parallelograms connected to a stationary base above and a moving platform below. The base is essentially an equilateral triangle, with three legs connected to it—one on each side of the triangle—each moved by a small motor. These legs are jointed (think of knees), with the lower sections consisting of two bars in parallel, and the lower end of each bar connected to the moving platform, which is also an equilateral triangle. These lower sections of the legs make up the three parallelograms that control the platform, constraining it to X, Y, and Z motion, parallel to the base.
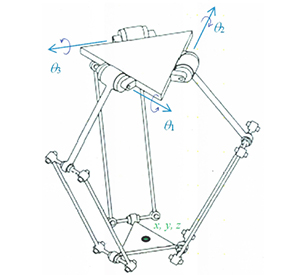
Image credit: Ohio University
A fourth axis can be included for rotation, either by attaching a rotary actuator directly to the platform, or by adding a leg that extends from the center of the base to the center of the platform, with a rotating joint on the end. (Note that this leg must be telescoping, as its length will change as the three primary legs change position.)
Design advantages of delta robots
Delta robots dominate the field when it comes to speed and acceleration, because only their legs and platform move (along with the payload, of course). This means that they have much less moving mass and inertia than SCARA, 6-axis, or even Cartesian robots, and can achieve accelerations in the range of 150 m/s2 and maximum speeds up to 10 m/s. To further capitalize on this design benefit, the legs and platform can be made from lightweight materials, such as aluminum or carbon fiber.

Image credit: wikipedia.org
Unlike serial robots, in which the errors in each arm accumulate, in the parallel robot design, the errors in each leg are averaged. This gives delta robots the ability to achieve sub-millimeter repeatability. The parallel design also provides high stiffness, because the legs work together against external forces and torques. (Note that the stiffness of the legs, which is influenced by their material and size, also has an effect on the robot’s stiffness.)
Being mounted above the workspace, delta robots have no interferences in their work area, meaning there are no “dead zones,” or zones that the end effector cannot reach within the defined work envelope. Overhead mounting also makes delta robots easy to adapt for harsh or challenging environments. With the major electromechanical parts mounted above the work area, they can be shielded from harsh chemicals or debris, or enclosed to make them clean-room or wash-down compatible. And the legs can be made of virtually any material that is suitable for the environment.
Applications then and now
Delta robots were introduced for industrial applications in the early 1990’s, with the first robots being employed in the packaging industry. As vision systems and force sensors were integrated, delta robots began to move beyond simple pick-and-place operations, and by the late 1990’s, their applications had expanded into the electronics and assembly markets.
More recently, delta robots are being deployed in high-speed assembly and light machining applications. And new industries, such as 3D printing, are taking advantage of their relative mechanical simplicity and high-speed capabilities. Now, delta robots can be found in virtually any application that requires the ability to achieve extremely fast speeds and accelerations with light payloads.
Feature image credit: ABB

Leave a Reply
You must be logged in to post a comment.