
Servo systems are made up of four key parts: a motor, a feedback device, a servo drive, and a motion controller. The servo drive and motion controller work together (supported by information from the feedback device) to provide the correct power to the motor so that it executes the intended movement or produces the desired torque. The motion controller’s role is to determine what needs to be done to achieve the desired position, velocity or torque — it takes care of the higher-level processing and decision-making. The motion controller sends this information to the servo drive, which produces the voltage that energizes the motor windings and causes the motor to rotate or produce torque.
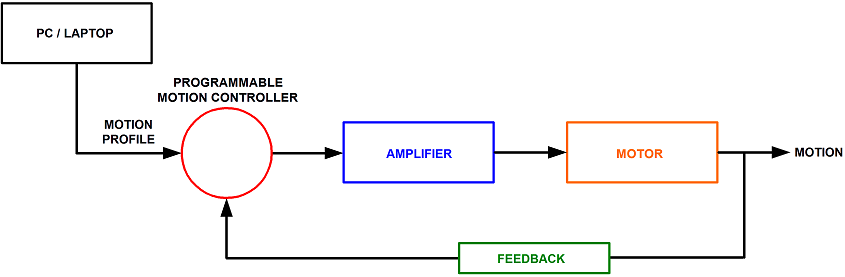
Image credit: H2W Technologies, Inc.
Servo drive ⇒ nervous system
The servo drive can be thought of as the nervous system for the motor, because it delivers the signals, in the form of voltage and current, that cause the motor to move. A servo drive is sometimes referred to as an “amplifier” because it amplifies the voltage signals that come from the controller, which are too low to drive sufficient current through the motor windings to cause meaningful speed or torque. Although servo drives can work on analog or digital signals, nearly all modern servo drives are digital.
Digital servo drives have internal processing capabilities that allow them to not only manage position, velocity, and torque loops, but also take over higher-level functions, such as trajectory generation. Digital drives also allow tuning to be done via software (versus manual tuning via potentiometers on analog versions), and they are able to monitor internal functions and provide detailed fault diagnostics.
Motion controller ⇒ brain
The motion controller is responsible for higher-level computation and decision-making, making it analogous to the “brain” of the servo system. Although a motion controller handles many supervisory and processing tasks (such as managing limits and emergency stops), the most basic functions of a motion controller are command tracking and disturbance rejection. The controller’s execution of these functions is often referred to as “closing the (control) loop.”
Command tracking (sometimes referred to as “reference tracking”) means ensuring the motor follows the application’s motion profile without error, or with minimal error. The motion controller does this by continuously comparing the actual value (position, velocity, or torque) of the motor — based on feedback from the encoder — to the desired value and sending signals to the drive to correct any errors between the actual and desired values.
Unlike command tracking, which deals with errors that occur continuously throughout the motion, disturbance rejection deals with errors caused by external forces that cause the motor to deviate from the target value (position, speed, or torque). Disturbance rejection processes these errors and issues commands to correct them.
Both the command tracking and disturbance rejection functions are enabled by gains in the servo system’s control loops. Servo tuning involves finding the appropriate gains (the amount and type of correction for different error conditions) to achieve satisfactory command tracking and disturbance rejection without causing the system to become unstable.
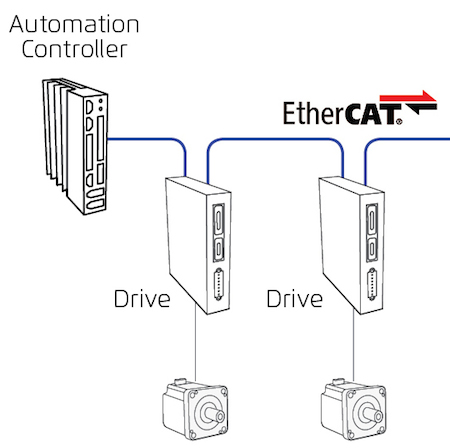
Image credit: ACS Motion Control
Motion controllers come in many forms, with the most common being PLCs (programmable logic controllers), PACs (programmable automation controllers), and IPCs (industrial PCs). While increasing functionality in all three types of motion controller has blurred the lines between them, in general, PLCs work well for simpler motion control applications, such as single-axis motion, while PACs are better for multi-axis, coordinated motion or circular interpolation. Industrial PCs are typically used when the controller is responsible for extensive data collection and processing, or when integrated vision is required.
Servo drive + motion controller = servo controller

The term “servo controller” is sometimes used as an umbrella term for the parts of the system responsible for controlling the motor — the servo drive and the motion controller. Although here we talk about the components of a servo system as individual pieces of hardware, in reality, they are often integrated to various levels. Case in point: nearly all servo motors include an integrated encoder for feedback. And servo motors with integrated drives are extremely common, with some designs integrating traditional motion controller functions as well.
Feature image credit: Advanced Motion Controls



Leave a Reply
You must be logged in to post a comment.