
Servo motor performance is highly influenced by the motor’s ability to dissipate heat and avoid thermal overload, which can damage internal components and even demagnetize the magnets. Internal thermal sensors can protect the motor during operation, but proper sizing and selection are the first step to ensuring that the motor is not at risk of thermal overload within the parameters of the application.
One tool for servo motor selection is the torque-speed curve, which depicts the motor’s continuous and intermittent operating zones. Because the servo amplifier can limit the motor’s peak speed and torque, it’s important to note that torque-speed curves are often based on specific motor and amplifier combinations. Regardless, the continuous and intermittent zones are the ranges of torque and speed that can be achieved for specific amounts of time without the risk of overheating the motor.
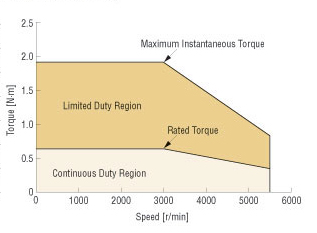
Image credit Oriental Motor U.S.A. Corp.
When sizing a servo motor, two torque values are taken into consideration—maximum torque and root mean square (RMS) torque. Maximum torque is relatively straightforward. For most applications, it is the sum of the torque due to acceleration, torque due to the load, and torque due to friction. Maximum torque is required only for a short amount of time, thus it should fall within the intermittent duty zone of the motor’s torque-speed curve, provided the duration for which peak torque is required falls within the time limit defined by the manufacturer.
The varying torque requirements found in nearly all applications—torque during acceleration, torque during constant velocity (typically the process phase of the application), torque during deceleration, and torque during dwell—make assessing the motor’s heat generation and ability to dissipate this heat over the full duty cycle of the application a more complex task. This is where the RMS torque calculation comes into play.
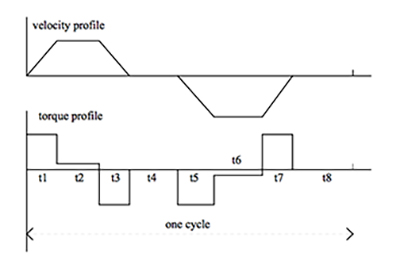
Image credit: Drivetech, Inc.
The RMS calculation takes into account not only the varying amounts of torque that are needed during operation, but also the amount of time for which each torque must be produced. The result is a torque value that, if produced continuously by the motor, would yield the same level of motor heating as all the various torques and durations encountered by the motor during its duty cycle.

Because it’s a steady-state, or continuous, value, the RMS torque should fall within the motor’s continuous operating zone. And while the drive components—motor, amplifier, gear reducer—should be considered together as a system, calculating and checking the RMS torque required for an application ensures that the motor is properly sized to avoid thermal overload.
Root mean square is a statistical term that means the square root of the mean of all the squares in a sample. It can be applied to a series of discrete values (as is the case when calculating RMS torque), or to a constantly varying function.

While root mean square is most often used for torque in motion control applications, it can also be applied to current, force, or any parameter whose value varies throughout the application, to provide a useful means for assessing the application requirements.





Leave a Reply
You must be logged in to post a comment.