
By Anant Bhalerao, Product Line Manager, Stepper Motors, Portescap • Can stack linear actuators are a good go-to solution for many linear motion systems — including modern stage lighting systems.
Can stack motor technology is not new. In fact, it’s a compact and easy option for converting rotary to linear motion. Can stack motors may not have the ability for extremely small incremental steps (such as other stepper motor based linear actuators with 1.8 or 0.9° steps), but for the right application, they just might be the best option.
Can stack linear actuators are stepper-motor based actuators used in an increasing range of applications. One interesting application where they’ve made a difference recently is in the entertainment world — specifically, stage lighting.
Contemporary stage lighting systems have automated mechanisms and capabilities beyond the scope of the more traditional stationary illumination systems, and play an important role in performing arts like opera, theater and dance, but also in architectural exhibitions. Also, new light emitting diode (LED) technology has seen significant improvement over the past several years, bringing stage lighting equipment to a new level.
Based largely on the venue and application, an intelligent stage lighting system can be a more versatile and economical option than traditional lights because, with proper programming, they can swiftly alter many aspects of their optics, therefore changing the mood and effect. Intelligent lights are typically pre-programmed and played back using simple commands.
Intelligent fixtures using LEDs have gained widespread acceptance in the concert industry due to these advantages, as well as having high light output and lower power consumption.

Another feature of intelligent stage lighting is the ability to remotely control the movement of the output light beam. This is done by either moving a mirror that reflects the beam, or by moving the entire fixture, which can pan and tilt.
Typically, they also contain other controls to shape, texture and color the light, such as a gobo or dichroic wheels. This ability to precisely and repeatedly set the position of the fixture allows one light to perform many functions, lighting multiple different areas in various ways. Mechanically, rotary stepper motors connected to various internal optical devices (such as gobos and color wheels) manipulate the light before it escapes the fixture’s front lens.
Smart can stack linear actuators are typically used for zoom or focus functions. Conventional LED fixtures use a fixed focal length, whereas advanced fixtures launched in recent years use a two-element zoom system.

In two-element zoom systems, the first element is a fixed lens, while the second lens elements are formed by a single plastic plate, which has several concave/convex lenses molded across its surface. This lens plate is attached to the shafts of three to four small stepper-motor-driven linear actuators.
All the linear actuators move in sync, extending and retracting an internal leadscrew. The lens plate attached to the shaft of the actuator then moves away or closer to the LEDs providing varied zoom angles. The fixture will have the widest zoom spread when the lens plate is positioned closest to the emitters.
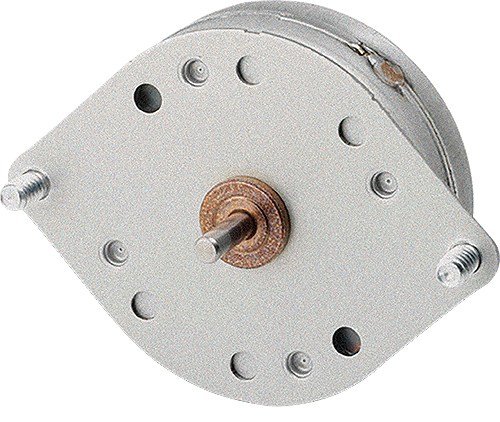
Can stack linear actuator basics
A stepper linear actuator consists of a can stack stepper motor with a threaded rotor and an integrated leadscrew that provides direct linear motion in a compact package. Unlike a dc motor, the can stack linear actuator leadscrew retracts and extends in discrete step increments when electrical pulses are applied. One of the important advantages of using a can stack linear actuator is its ability to be accurately controlled in an open-loop system, which means no expensive feedback device or braking system is required for positioning.
Depending on the level of integration required, the actuator can be captive or non captive:
Non-captive linear actuator — The resultant motion is linear but the screw also rotates.
Captive linear actuator — The shaft is made of two pieces: the rear section is a leadscrew and rotates through the nut, and the front section is a grooved shaft. It engages with a “butterfly” plastic end cap and acts as an anti-rotation device. The resultant motion is a pure linear motion.
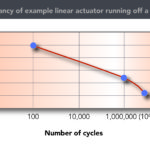
Because the step error is non-cumulative, high accuracies are possible across long or short travel distances, eliminating the need for position feedback devices such as encoders. Motors can be operated in single step, half step or micro stepping modes leading to improved resolution and quieter operation.
Select the right linear actuator
Several design considerations are required for choosing the right linear actuator for this lighting application. Some of the critical parameters are:
Force: The force requirement for each type of fixture varies with the weight of the lens plate and how quickly the zoom angle change is required during its operation. Modern stage lights use high-speed zoom control and typically actuators are required to deliver required force operating at greater than 500 pulses/sec.
It is recommended to keep at least a 50% safety factor above the theoretical force requirement to achieve a smooth jumpstart.
Stroke length: Linear actuators with a variety of stroke lengths are available. Suitable stroke length can be selected based on the required displacement of the lens plate. It’s recommended to keep some safety factor in mind and not drive the motor lead screw at the extreme end because in some cases this can jam the motor.
Repeatability: As one of the requirements of this application is the need for multiple motors to work in sync and under digital control, repeatability is a must to achieve consistent performance. Repeatability of the motors is affected mainly by step angle error. Typically stepper motors will have a step angle accuracy of 3 to 5% of one step. This error is also non-cumulative from step to step. The accuracy of the stepper motor is mainly a function of the mechanical precision of its parts and assembly. The maximum positive or negative position error is caused when the motor has rotated one step from the previous holding position. The performance of a stepper motor system (driver and motor) is also highly dependent on the mechanical parameters of the load. Increasing a frictional load lowers the top speed, lowers the acceleration and increases the positional error
Speed and resonance: Linear actuators can exhibit resonance when operated at extremely low or high speeds. This can be seen as a sudden loss or drop in torque at certain speeds or loss of synchronism. It occurs when the input step pulse rate coincides with the natural oscillation frequency of the rotor. Often there is a resonance area around the extreme pulse rate region. The resonance phenomenon of a stepper motor comes from its basic construction; therefore, it is not possible to eliminate completely. It can be reduced by driving the motor in half or micro stepping modes.
Radial play or wobbling: Radial play or wobbling in the motor shaft can seriously affect the quality of the light beam. A linear actuator with tighter tolerances and radial play of less than 200 µm can be a good choice for such applications.
Portescap
www.portescap.com




Leave a Reply
You must be logged in to post a comment.