
Screw jacks are indispensable linear-motion designs for lifts and other vertical-motion applications. They consist of six main components.
First there is the housing. This contains all of the internal jack components.
Second is the worm shaft – this is an input to the jack and typically where a motor handwheel is attached.
The third jack subcomponent is the drive sleeve. This is the mating part to the worm shaft and is cut to ASME standards. The combination of the worm shaft and drive sleeve makes up the gearing ratio for the screw jack.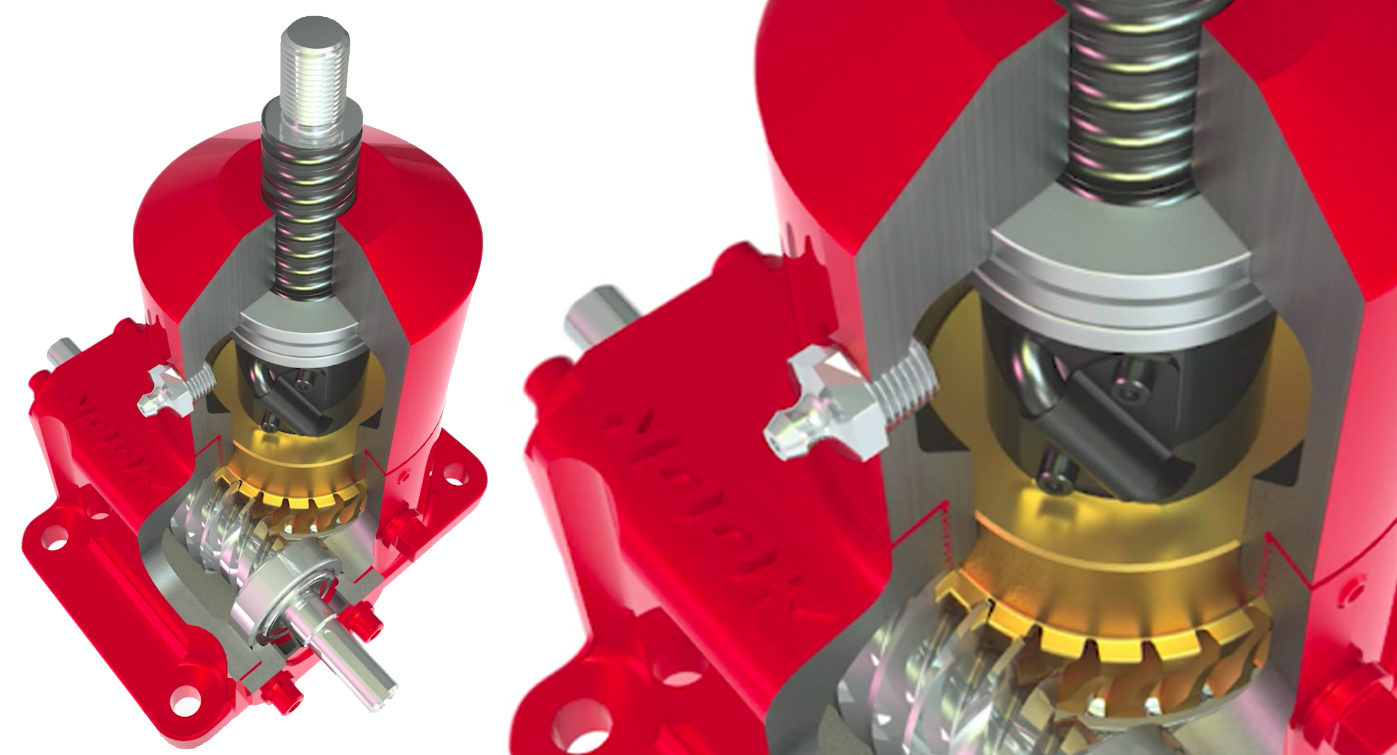
Jacks also have bearings on each side of worm shaft and on top and bottom of drive sleeve. These bearings tend to be either tapered roller bearings or thrust bearings.
Finally, jacks have a lift shaft — either ball or acme screw depending on the jack type — as well as a hut.
Reconsider the input. How does one determine the amount of linear travel for each input turn of a handwheel or motor? This is a function of jack size and lead screw in the jack as well as the gear ratio. Standard ratios are available and selectable per each jack size. So a given jack may have two or three options for gear ratio ranging from 5:1 to 32:1. What’s more, each size of screw jack is preselected with a given screw size and lead in mind.
Some manufacturers include catalog specifications in terms of the number of turns per one unit of linear travel. This simplifies calculations of required motor rpm, linear travel rate, or turns of a handwheel to advance a given distance.
Screw-jack accessories abound for both ball screw and machine screw jacks. Some manufacturers conduct engineering reviews to ensure a screw jack is suitable for a given application.
In the following video recorded at the Design World offices, Jonathan Kasberg of Nook Industries explains more about how engineers can determine linear travel for each input turn. Nook can customize motor mounts and offers specialty right-angle reducers with its jacks. The manufacturer incorporates servo, ac, or dc motors into designs upon request — as well as control panels for OEMs requiring completed linear-motion setups.




Leave a Reply
You must be logged in to post a comment.