
In nature, some animals — such as bats and dolphins — analyze the echo of a sound or call (a process known as echolocation) to navigate or to find prey. In industrial applications, ultrasonic sensors use the analysis of echos from ultrasonic waves to determine the presence, position, or distance of an object.
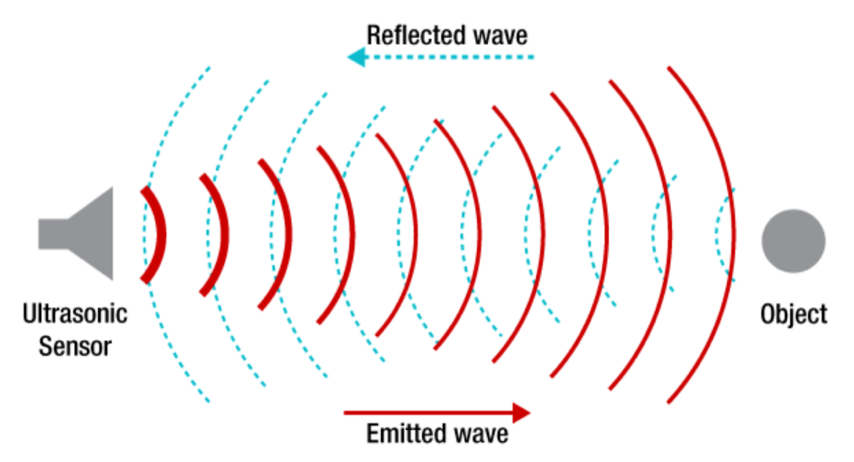
Image credit: Texas Instruments
Ultrasonic waves are sound waves emitted at a frequency higher than can be detected by human hearing — typically above 20 kHz.
Ultrasonic sensors use piezo ceramics to emit and receive ultrasonic waves, converting electrical energy to acoustic energy during transmission and then acoustic energy back to electrical energy during receiving. By analyzing the timing, distortion, or absence of the echo, ultrasonic sensors can detect the presence or position of an object or measure the distance to a target object.
Ultrasonic sensors for industrial applications generally come in three varieties: diffuse mode, retroreflective, and thru-beam.
Diffuse mode is the most common type of ultrasonic sensor, using a single transducer to both emit and receive the ultrasonic waves. A simple formula allows the object’s distance from the transducer to be calculated:
![]()
d = distance to object, one-way (m)
c = speed of sound in specified medium (m/s)
t = time between emission and reception, also referred to as “time of flight” (s)
Retroreflective mode is similar in that it uses only one transducer to both send and receive, but in retroreflective mode, ultrasonic waves are constantly reflected to the transducer by a separately-installed reference reflector. When there’s no object between the sensor and the reference reflector, the sensor receives a constant echo from the reflector. But if an object enters the sensing range, the reflection of the echo wave changes, and the sensor detects the object’s presence by the change in the echo. This mode is often used when the object to be detected absorbs sound or when its surface is not easily detectible, such as very smooth or slanted surfaces.

Image credit: Baumer
For thru-beam mode, the emitter and receiver are separate devices mounted opposite one another along a common axis. When an object disrupts the ultrasonic waves between the emitter and receiver, an output signal is activated. Thru-beam ultrasonic sensors have double the detection range of a typical diffuse mode or retroreflective sensor. Their switching frequency can also be much faster than other types.
When a single transducer is used as both the transmitter and receiver, it experiences a blind zone — an area in front of the sensor where objects cannot be detected. This is because the sensor cannot transmit and receive at the same time. The size of the blind zone is determined by how long it takes for the resonant energy from transmission to dissipate.
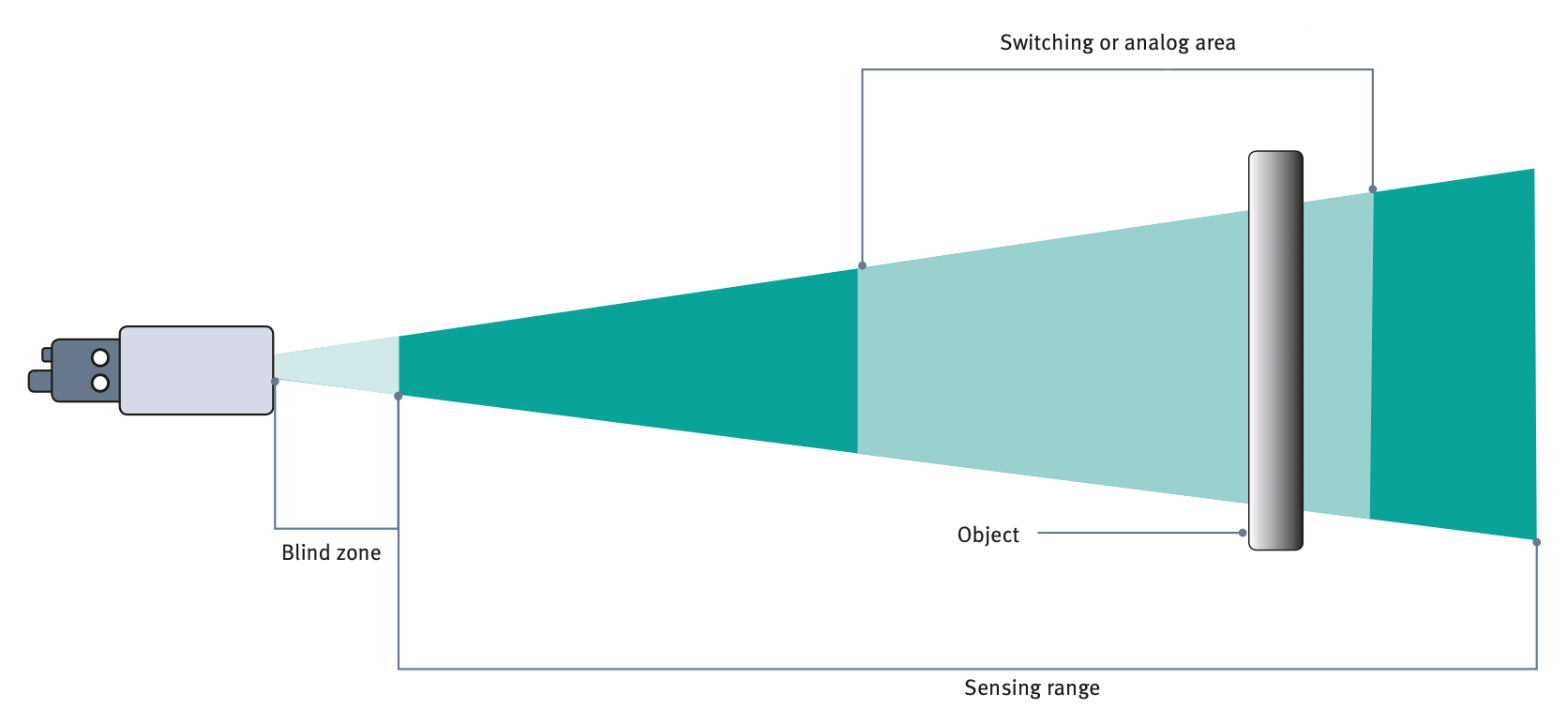
Image credit: Pepperl+Fuchs
Because thru-beam type sensors use separate devices for transmitting and receiving, they don’t experience a blind zone.
Output can be an analog voltage or current value that varies proportionally with the measured distance, a digital value representing position, or a switching output for on/off operation.
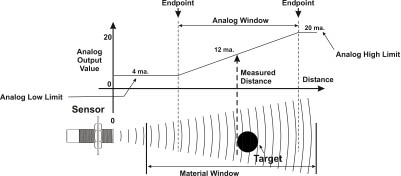
Image credit: Senix
Ultrasonic sensors work for almost any kind of target medium, including powders and liquids and objects that are transparent, have a high-gloss finish, or that change color. However, materials that are absorbent — such as wool, cotton, or foam — reduce the sensing distance and accuracy. Ultrasonic sensors are also resistant to most disturbances that affect other types of sensors, such as vibration, ambient noise, dust, smoke, or mist. And some manufacturers offer designs that are sealed in a stainless steel housing, so they can be used in aggressive environments and fulfill hygiene requirements for food and beverage applications.
Sensing range depends on the surface properties and the angle of the object to be detected, but can typically reach several meters, with resolution in the range of 0.1 mm and absolute accuracy (accuracy of distance measurement to a non-moving object) of 1 to 3 percent. The longest sensing ranges are achieved for surfaces that are flat and positioned at an exact right angle to the sensor.
Because they rely on the “time of flight” of ultrasonic waves, ultrasonic sensors are sensitive to environmental factors that affect the speed at which the waves travel. For example, air temperature* can have a significant effect on the accuracy of ultrasonic sensors, so they typically include temperature probes and compensation algorithms. And at high temperatures, the speed of sound in air is affected by humidity, with speed increasing as humidity increases.
*The speed of sound in air is approximately 343 m/s at 20° C, but changes by 0.175 percent per degree C.




Leave a Reply
You must be logged in to post a comment.