
Accuracy and repeatability are standard specifications that describe how a linear motion system behaves along its travel and how closely it reaches the intended position. Resolution, on the other hand, is less often included in performance data for linear motion systems, but it can be equally important as accuracy and repeatability in some applications.
In general terms, resolution specifies the smallest increment that a linear system can measure or display. Think of the marks on a thermometer. A high-resolution thermometer may have tick marks indicating every 0.5-degree increment, while a low-resolution thermometer may only have tick marks for every 2-degree increments.
For a linear motion system, resolution specifically refers to the smallest movement the system can make.

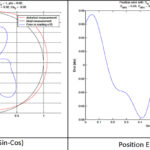
Image credit: Celera Motion
When driven by a servo motor in a closed loop system, resolution is measured by an encoder — ideally a linear encoder mounted on or very close to the axis being measured. For linear encoders, resolution is stated as the distance (microns or nanometers) between lines, or counts, and for rotary encoders, resolution is given as the number of measuring units (counts or pulses) per revolution. Although the resolution of an encoder is set by the number of lines and their spacing, the method of signal processing used by the controller can improve resolution. When both the leading and trailing edges of one encoder signal are counted, resolution is effectively doubled. When both the leading and the trailing edges of two signals are counted — referred to as quadrature encoding — resolution is increased by a factor of four.
However, just because an encoder can measure a particular resolution or movement distance, this does not guarantee that the linear system can actually execute the move. In real-world applications, the ability of a mechanical system to move very small distances is limited by internal friction and preload, as well as compliance, or windup, in the components. Similarly, the maximum frequency that the drive and controller can accept on the encoder input — 20 million counts per second, for example — may limit the speed of the system due to processing limitations.
Instead of resolution, manufacturers often specify minimum incremental motion (MIM), or practical resolution, which indicates the smallest movement the linear system can consistently and reliably achieve.
Stepper motors are inherently well-suited for high-resolution moves, because their movements occur in discreet steps. The resolution of a stepper motor-driven system is determined by the lead of the screw, divided by the number of steps per revolution of the motor. When microstepping is used, theoretical system resolution can be significantly increased. However, like servo systems, stepper systems also experience a minimum incremental move, which is limited by the mechanical components and controller bandwidth.

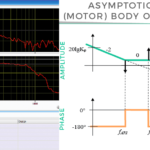
Image credit: Aerotech Inc.
For linear systems, resolution is an important specification for applications that require very small, highly accurate moves, such as inspection and scanning processes. With low-friction linear guides and a high-bandwidth controller, ball screw driven systems can achieve practical resolution in the range of 100 μm. But when resolution in the single-micron or high-nanometer range is required, most applications will use a linear stage with non-recirculating bearings, such as crossed roller bearings or air bearings, in conjunction with a linear motor or a piezo drive, to completely eliminate recirculating elements that would introduce friction and high breakaway forces.



Leave a Reply
You must be logged in to post a comment.